

Maneuvering target robust tracking method under generalized correlation entropy criterion
A generalized correlation and target robust technology, applied in the field of maneuvering target robust tracking, which can solve problems such as the effect of interactive multi-model state estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
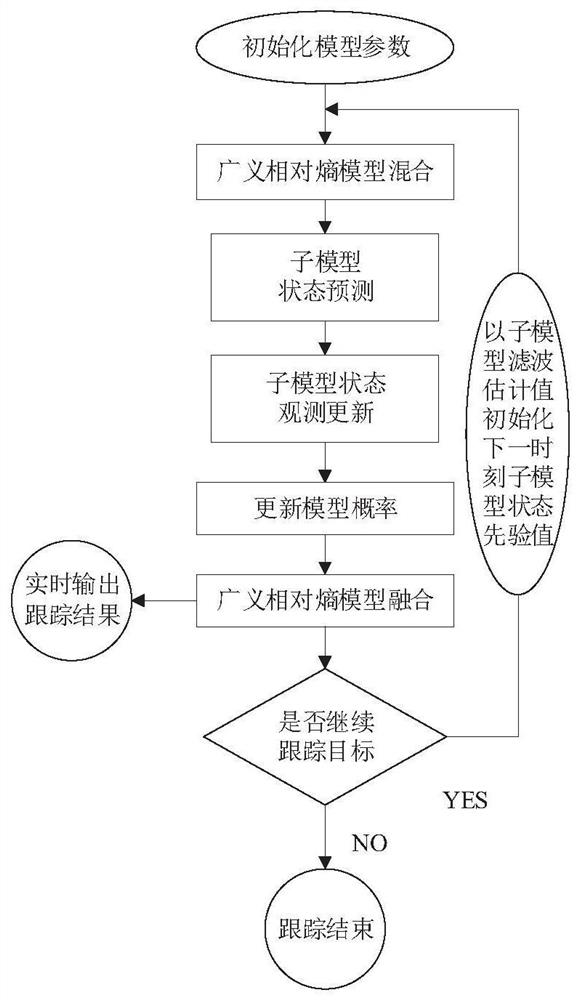
[0059] The present invention will be described in further detail below with regard to specific implementation, general flow process can refer to figure 1 .
[0060] A method for robust tracking of maneuvering targets under the generalized correlation entropy criterion proposed by the present invention comprises the following steps:
[0061] Step 1: Initialize the required model parameters;
[0062] Firstly, a linear jump Markov model about maneuvering target tracking is given:
[0063]
[0064] Among them, the subscript k represents the kth discrete moment, x k Represents the state variable of the target, including physical quantities such as the position and velocity of the target, z k Represents the observed value of the sensor, F k and H k Represent the state transition matrix and observation matrix, respectively. w k-1 and v k represent the Gaussian process noise of the system state transition and the Gaussian observation noise of the sensor observation process,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More