Unmanned aerial vehicle battery replacement method and system
A replacement method and drone technology, applied in battery/fuel cell control devices, charging stations, motor vehicles, etc., can solve problems such as long operation time, shortened power supply time, and low work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0088] Embodiment 1 of the present application provides a method for replacing a drone battery, which will be described in detail below with reference to the accompanying drawings.
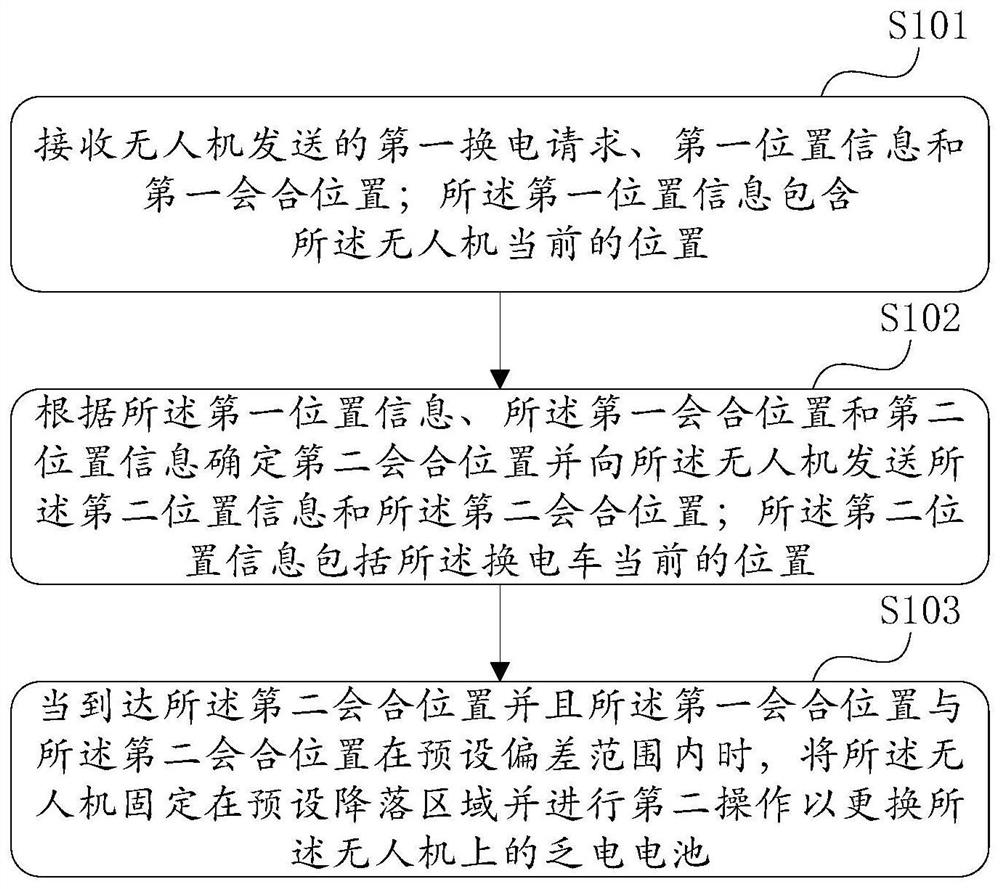
[0089] see figure 1 , which is a flowchart of a method for replacing a drone battery provided in Embodiment 1 of the present application.
[0090] The method described in this embodiment is applied to changing electric cars, and the method includes the following steps:
[0091] S101: Receive a first battery change request, first location information, and a first rendezvous location sent by the drone; the first location information includes the current location of the drone.
[0092] The electric car that can be applied to the method provided by the embodiment of the present application can be a fuel car, a new energy car, etc. The electric car can also have automatic driving capabilities, remote control capabilities, etc. The electric car can work in areas covered by traffic roads, or it can Pos...
Embodiment 2
[0106] The embodiment of the present application also provides another method for replacing the battery of the drone. The difference from the first embodiment is that this embodiment also specifically includes the workflow of the drone during the battery replacement process of the drone. The following Describe in detail in conjunction with accompanying drawings.
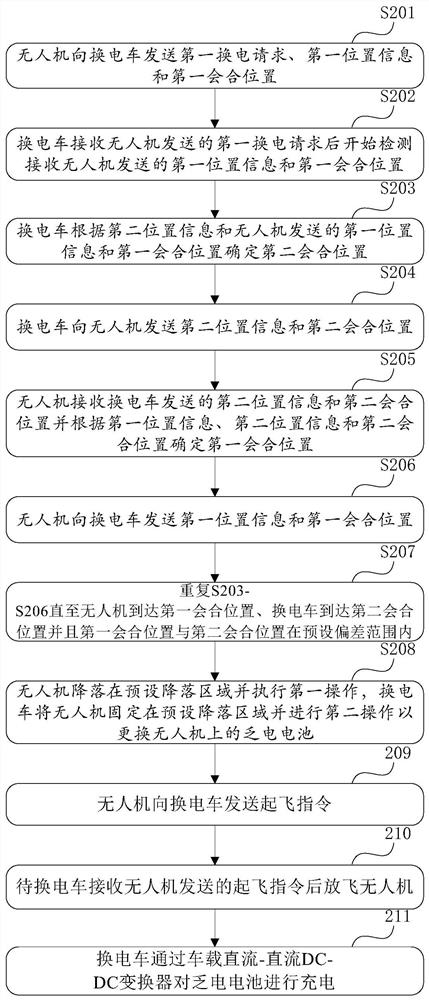
[0107] see figure 2 , which is a flow chart of another drone battery replacement method provided in Embodiment 2 of the present application.
[0108] S201: The drone sends a first battery swap request, first location information, and a first rendezvous location to the battery swap car.
[0109] The UAV can maintain information communication with the electric car at all times, but this will cause a waste of battery power and shorten the battery life of the UAV. Therefore, when the battery power of the UAV is sufficient, the UAV and the electric car will not perform information interaction; When the UAV battery powe...
Embodiment 3
[0155] Based on the UAV battery replacement method provided in the above-mentioned embodiments, Embodiment 3 of the present application also provides a UAV battery replacement system, which can be applied to UAVs and battery replacement vehicles, and will be described in detail below with reference to the accompanying drawings.
[0156] see Figure 4 , which is a schematic diagram of a battery replacement system for drones applied to battery replacement vehicles provided by Embodiment 3 of the present application.
[0157] When the system provided in the embodiment of the present application is applied to a tram changer, it includes: a second communication module 301 , a second positioning module 302 and a second control module 303 .
[0158] The second communication module 301 is configured to receive the first battery change request, the first location information and the first rendezvous location sent by the UAV, wherein the first location information includes the current l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



