Automatic driving automobile track dynamic planning and tracking method based on transverse and longitudinal coordination
A technology for automatic driving and trajectory planning, applied in the direction of control devices, etc., can solve the problems of difficulty in meeting the high reliability requirements of automatic driving, relying on computational overhead, and difficult to meet the high real-time requirements of automatic driving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
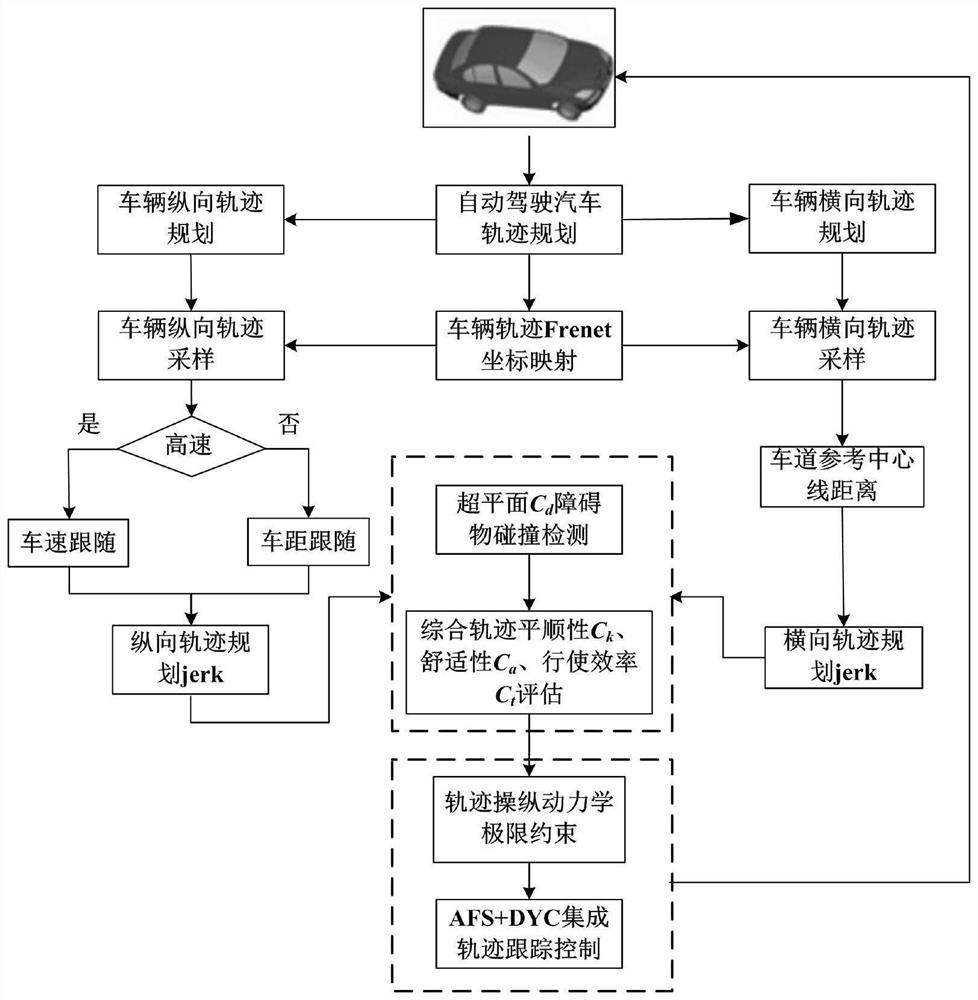
[0152] see figure 1 , a dynamic trajectory planning and tracking method for autonomous vehicles based on horizontal and vertical coordination, the steps are as follows:
[0153] S1. Trajectory sampling of vehicle driving state space:
[0154] The trajectory planning problem of the autonomous driving vehicle is mapped from the Cartesian coordinate system to the Frenet coordinate system, and the vehicle terminal motion state in the planning time domain is densely sampled in the state space of the vehicle driving, and the quintic and quartic polynomial curves are used to analyze the The state transition process is interpolated to complete the horizontal and vertical local trajectory re-planning.
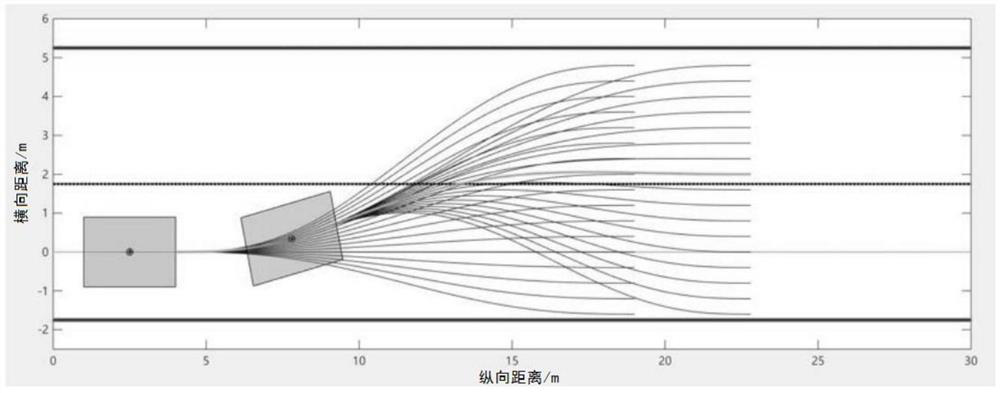
[0155] S2. Horizontal and longitudinal trajectory coordination planning and vehicle trajectory evaluation:
[0156] In the coordinated planning of horizontal and vertical trajectories, considering that vehicles in complex traffic environments and static and dynamic obstacles in the en...
Embodiment 2
[0160] This embodiment is basically the same as Implementation 1, the special features are:
[0161] Such as figure 1 As shown, a dynamic trajectory planning and tracking method for autonomous vehicles based on horizontal and vertical coordination, including the following steps:
[0162] 1. Vehicle driving state space trajectory sampling:
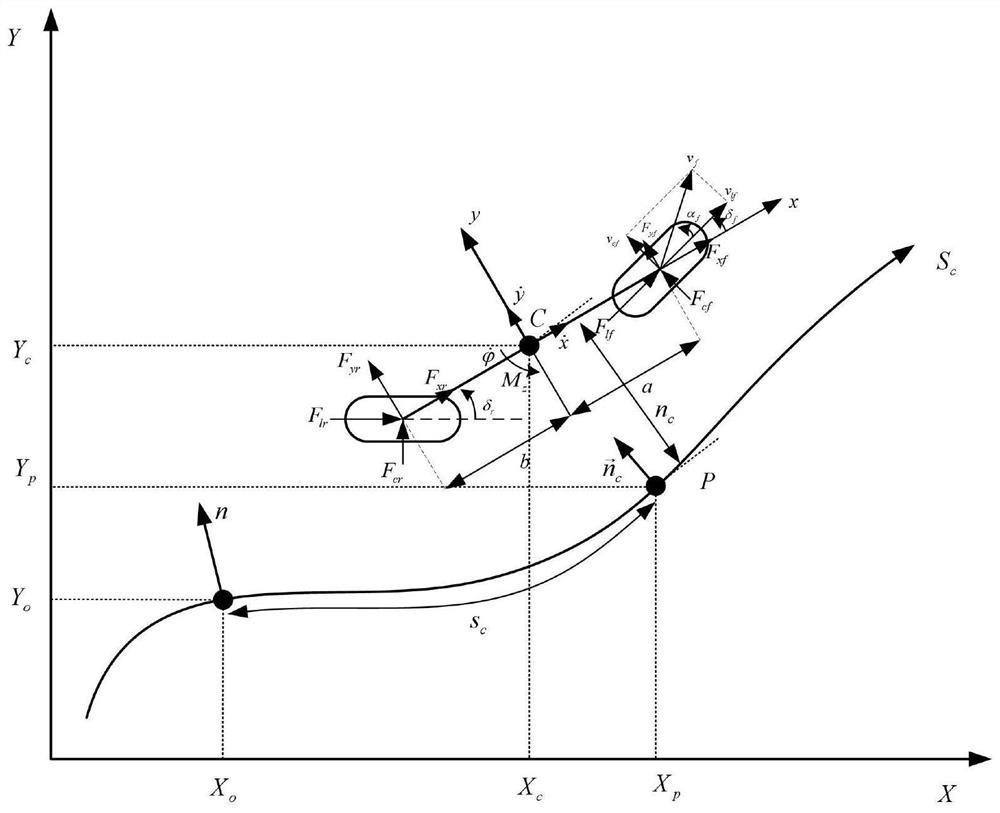
[0163] Mapping the vehicle position from the Cartesian coordinate system to the Frenet coordinate system includes the following steps:
[0164] The global map information includes lane way point coordinates (x i ,y i ), i∈N, the position of the main autonomous vehicle (x 0 ,y 0 ), vehicle speed v 0 , roll angle Acceleration a0 , yaw rate Calculate the lateral movement velocity v of the main vehicle lat and longitudinal motion velocity v lon , the expression is:
[0165]
[0166] Calculate the lateral motion acceleration a of the main vehicle lat and longitudinal motion acceleration a lon , the expression is:
[0167]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com