

Three-dimensional reconstruction method based on optimized IMU tight coupling dense direct RGBD
A three-dimensional reconstruction and tightly coupled technology, applied in the field of three-dimensional reconstruction, can solve the problems of unreliable nonlinear optimization estimation results, non-convergence of nonlinear optimization results, and the initial value deviates too far from the true value, so as to enhance global consistency and improve Observability, the effect of enhancing robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and do not limit the protection scope of the present invention.
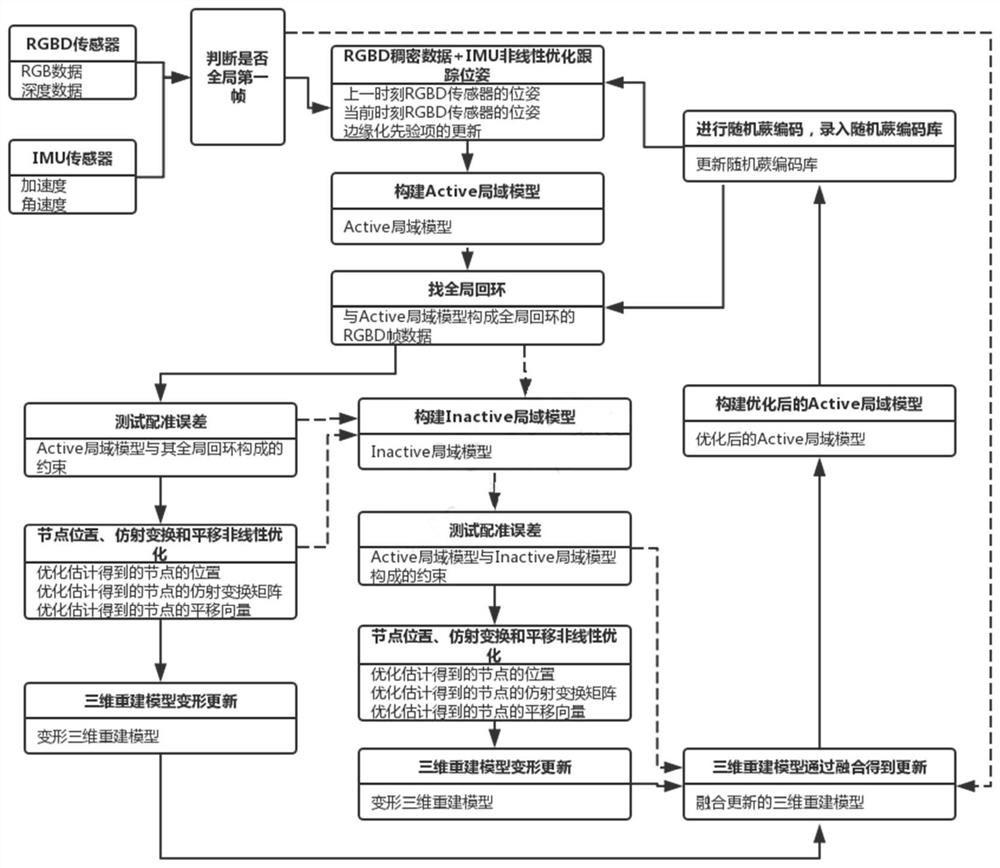
[0016] This embodiment provides a 3D reconstruction method based on optimized IMU tightly coupled dense direct RGBD. The main idea is that at the last time t k and the current time t k+1 In the time period between, according to the 3D reconstruction model constructed at the previous moment, the RGBD sensor data collected at the current moment is used to update the constructed 3D reconstruction model in real time. In the update, in order to solve the problem of robustness of the simple visual dense direct method in the visual sensor pose tracking estimation, IMU sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More