Improved robust unscented Kalman filter integrated navigation method
An unscented Kalman and integrated navigation technology, applied in the field of integrated navigation, can solve the problems of low filtering accuracy, poor positioning accuracy, and poor ability to handle outliers, and achieve strong environmental adaptability, high positioning accuracy, and strong self-adaptation sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
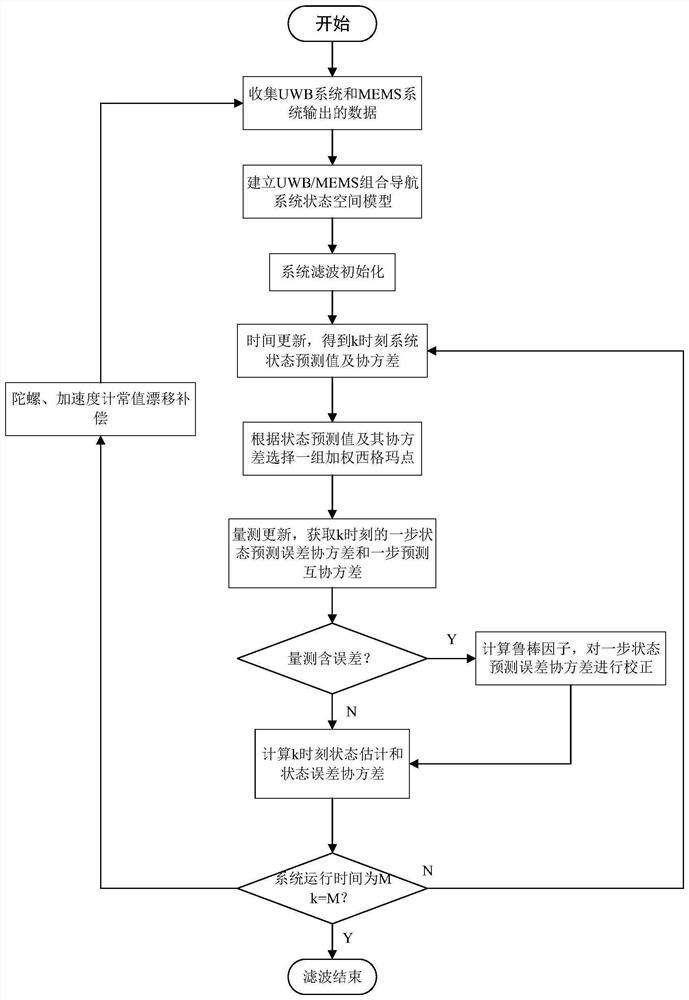
[0067] Specific implementation mode one: refer to figure 1 Specifically illustrate this embodiment, a kind of improved robust unscented Kalman filter combined navigation method described in this embodiment, comprises the following steps:
[0068] (1) Collect data output by UWB system and MEMS system;
[0069] (2) Select the state quantity and observation quantity, and establish the state space model of the UWB / MEMS integrated navigation system;
[0070] (3) UWB / MEMS combined system filter initialization;
[0071] (4) Time update. Calculate the predicted value and covariance of the system state at time k from the estimated value and covariance of the state at time k-1;
[0072] (5) Sigma point selection. Select a set of weighted Sigma points according to the state prediction value and its covariance;
[0073] (6) Measurement update. Use the Sigma point transformed by the nonlinear measurement equation to update the measurement, and obtain the error covariance of one-step ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com