Method and system for detecting and positioning regular object in real time
A technology of real-time detection and positioning methods, applied in character and pattern recognition, image data processing, instruments, etc., can solve problems such as low precision, weak illumination robustness, complex joint calibration and registration of radar and camera, etc. Achieving improved accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
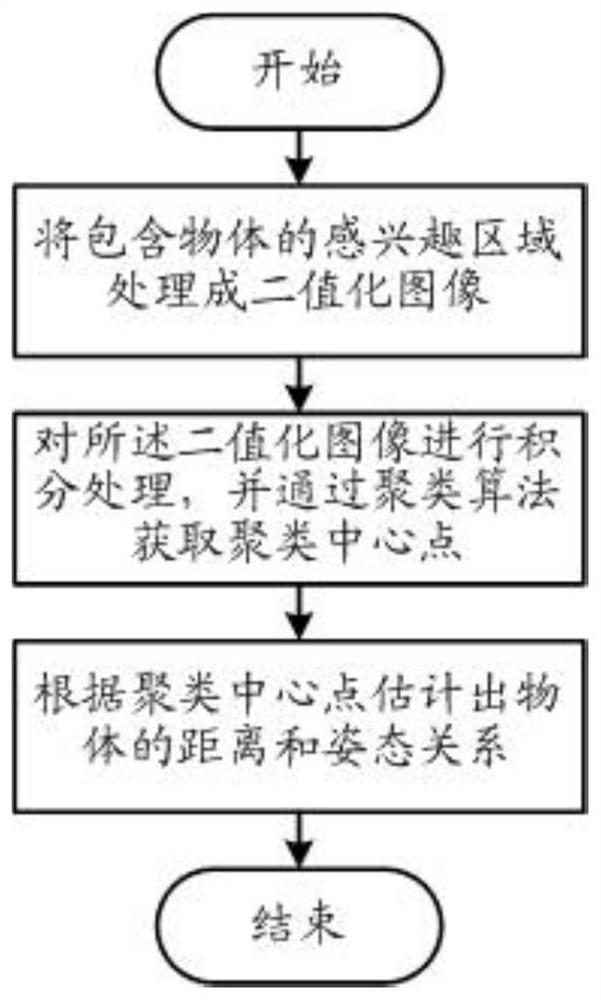
[0038] A method for detecting and locating pallets in real time, the specific implementation steps are as follows:
[0039] Step 1: Process the region of interest containing the object into a binarized image as input.
[0040] Step 2: Integrate on the binarized graph, perform clustering to obtain cluster center points;
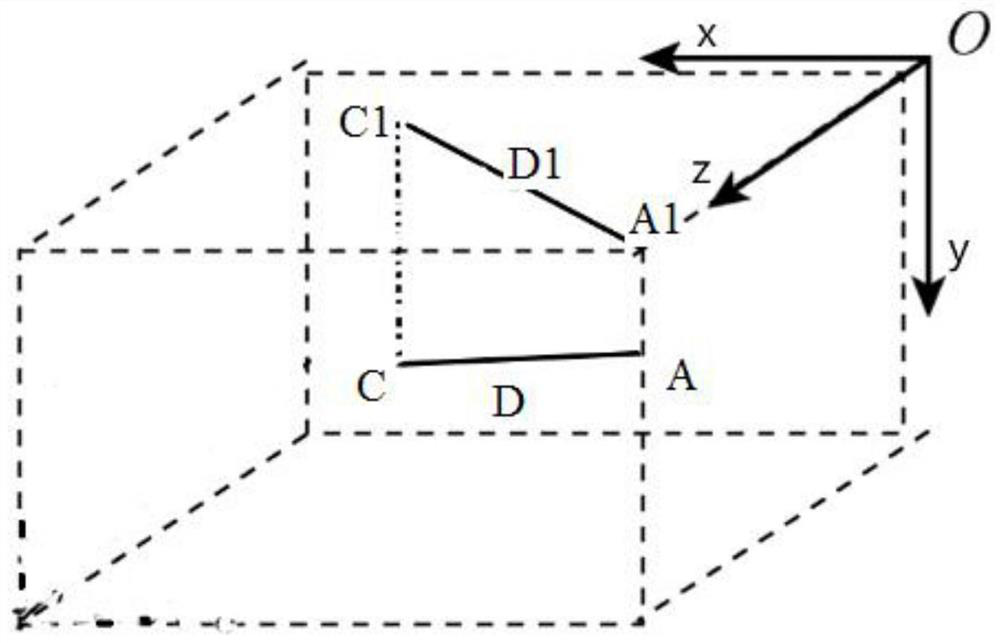
[0041] A clustering method is used on the integral graph data, where clustering can divide the original data of the integral graph into three categories (the number of holes on the pallet plane is 2, and the number of columns on the pallet plane is 3) as image 3 shown. image 3 The black in the figure is the column of the tray, and the white area is the hole.
[0042] Clustering can be a clustering algorithm based on K-Means, wherein, according to the characteristics of the pallet, three one-dimensional center points can be selected as the initial center points on the original integral map data. For faster convergence, the three initial The coordinates of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com