

A semantic intelligent substation inspection robot navigation system and method
A technology of intelligent substations and operating robots, applied in the field of substation inspections, can solve the problems of restricting robot inspection efficiency, strong subjectivity, unfavorable equipment status identification and fault diagnosis, etc., to improve composition efficiency and automation level, and improve data collection Quality, Interpretability Improvement Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
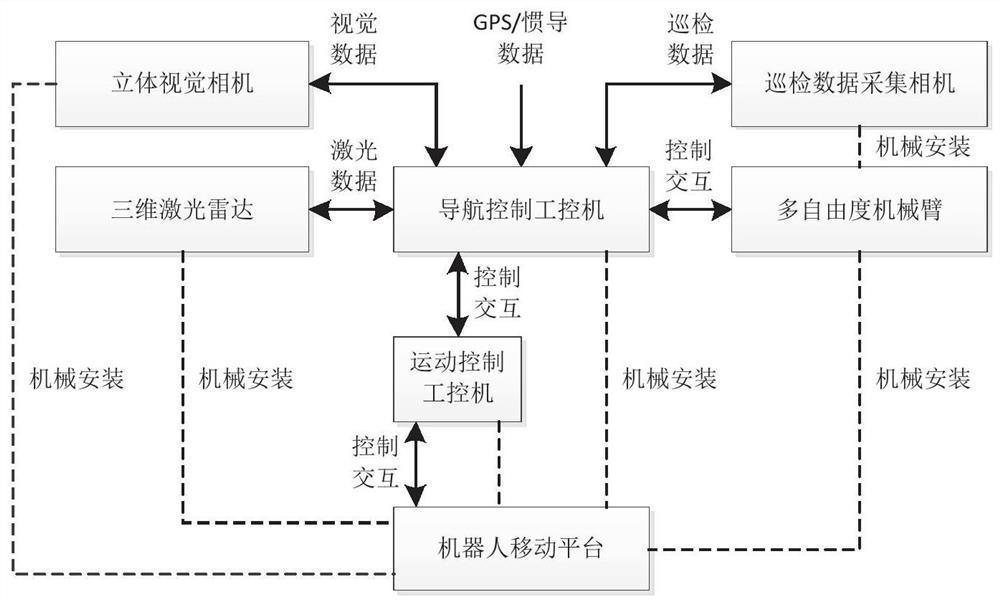
[0042] This embodiment discloses a semantic intelligent substation inspection robot navigation system, including: a navigation control industrial computer, and a multi-degree-of-freedom camera platform connected to the navigation control industrial computer, an inspection camera, a binocular vision camera, and a three-dimensional laser Radar, inertial navigation sensor, and motion control industrial computer; wherein, the inspection camera is set at the end of the multi-degree-of-freedom camera platform, and the motion control industrial computer is connected to the robot motion platform. It can realize the data access and synchronous acquisition of multiple vision, laser, GPS, inertial navigation and other sensors, so as to realize the panoramic perception of the robot itself and its surrounding environment.
[0043]The robot navigation system is built based on a ROS (Robot Operating System, robot operating system) distributed node communication network, and all devices are co...
Embodiment 2
[0071] Based on the navigation system described in Embodiment 1, this embodiment provides a navigation method for a semantically intelligent substation inspection robot, which stores a three-dimensional semantic map of the substation in advance. The method specifically includes:
[0072] Receive an inspection task, the inspection task includes a designated inspection area or designated inspection equipment;
[0073] Determine the equipment to be inspected corresponding to the inspection task according to the three-dimensional semantic map;
[0074] Use the three-dimensional projected coordinates of all equipment to be inspected in the three-dimensional semantic map as points on the robot's walking route, and plan the inspection route based on the current location of the robot; and, according to the three-dimensional semantic map, determine the The best inspection pose, when arriving at each equipment to be inspected according to the inspection route, detect according to the be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More