

Swallowing type fruit and vegetable picking robot
A picking robot and robot body technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of low picking efficiency, complicated control system, sucking leaves, etc., and achieve the effect of improving picking efficiency and simplifying control procedures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
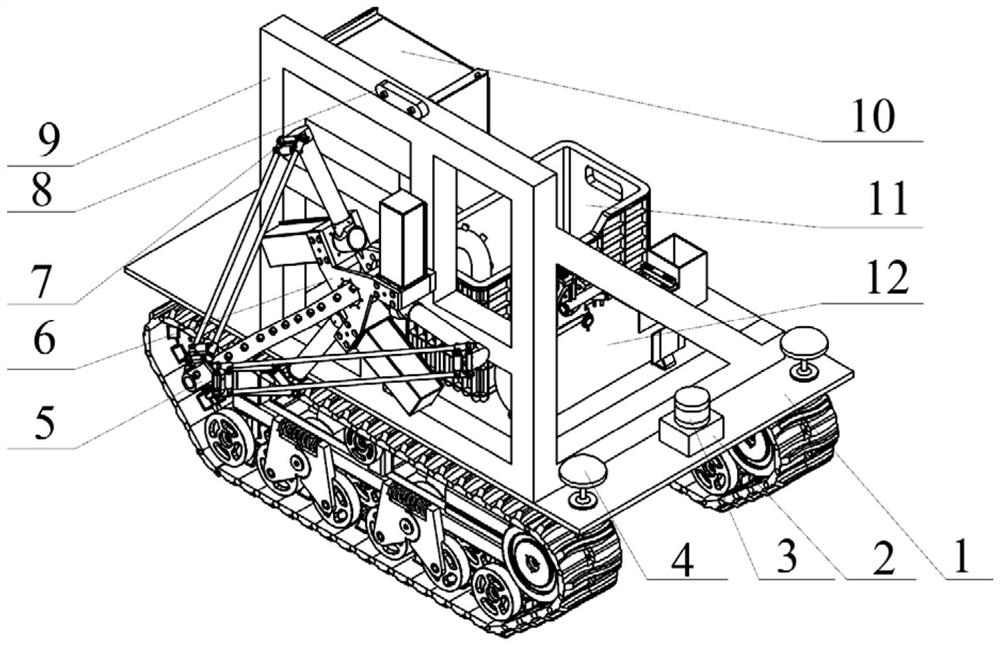
[0028] A swallowing fruit and vegetable picking robot, such as figure 1 As shown, it includes an intelligent mobile platform 1 , a bionic swallowing and transporting device 5 , a robot body 6 and an industrial computer 10 .
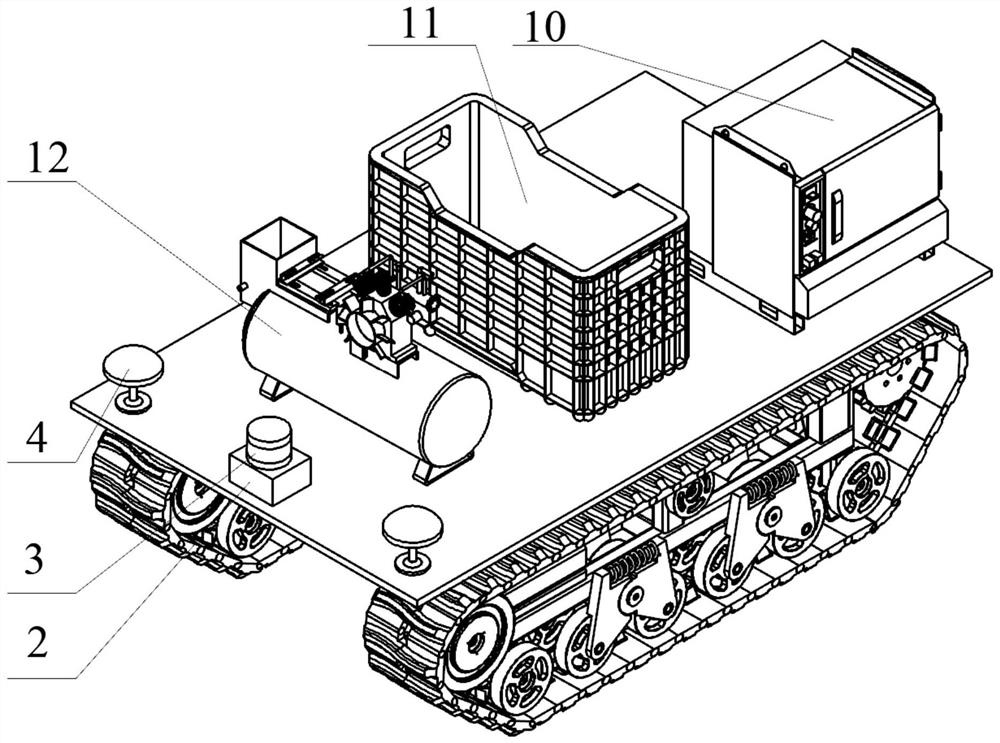
[0029] Such as figure 1 , 2As shown, the front side on the smart mobile platform 1 is equipped with a GNSS host 2, a laser radar 3 and 2 measuring antennas 4, and the measuring antenna 4 is arranged at both ends of the front side on the smart mobile platform 1, and the GNSS host 2 is arranged on The midpoint of the two measuring antennas 4, the GNSS host 2 and the measuring antenna 4 are used to receive satellite signals and measure the position and attitude of the intelligent mobile platform 1, and the laser radar 3 is installed on the top of the GNSS host 2 to sense the environment and realize intelligent movement Autonomous driving and efficient obstacle avoidance for Platform 1. Track wheels are installed on both sides of the frame below the intell...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More