

A bionic flapping-wing micro-aircraft based on the change of the center of gravity of the two-wing differential and the steering gear to achieve high control torque
A micro-aircraft and torque control technology, applied in the field of bionic flapping-wing micro-aircraft, can solve the problems of small control torque, limited range of attack angle change, single control torque form, etc., so as to improve control torque, improve effective control torque, increase Effect of displacement range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
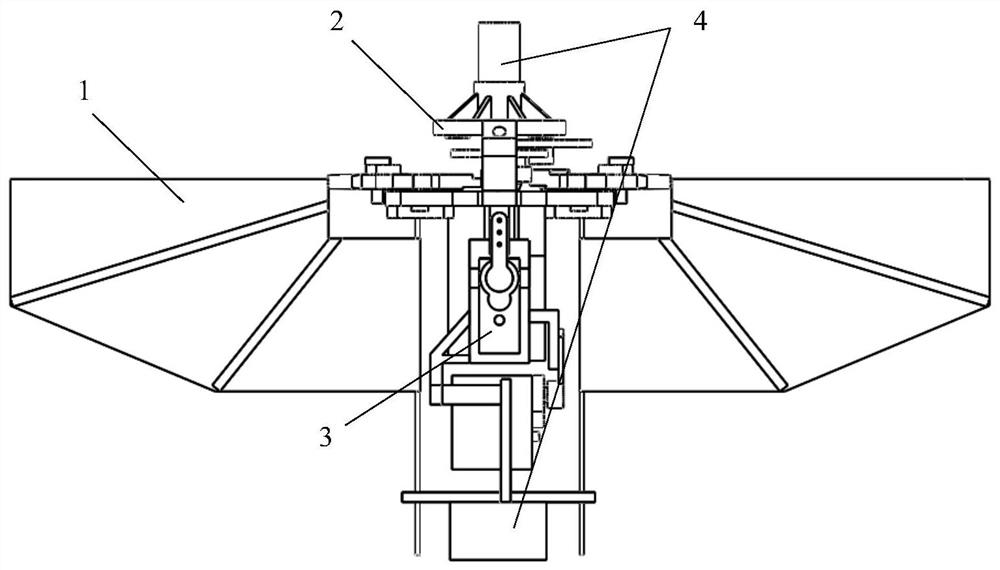
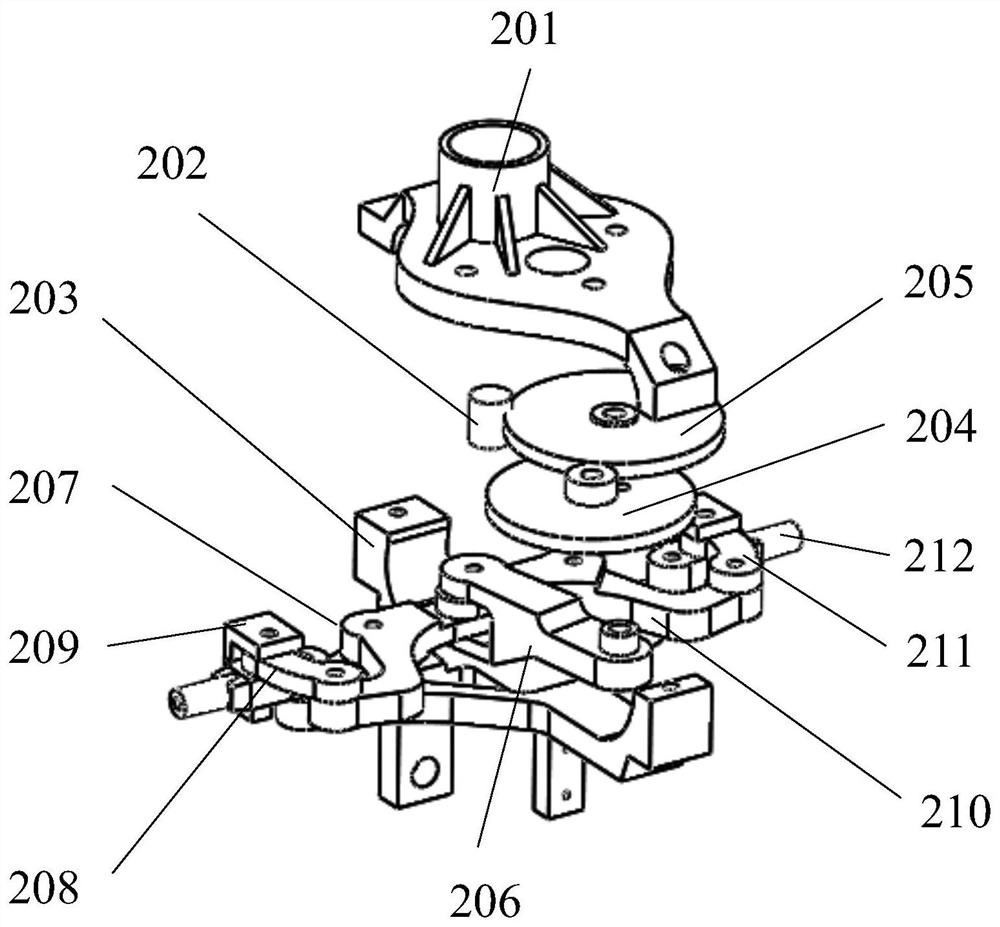
[0042] The bionic flapping-wing micro-aircraft that realizes the generation of high control moment based on the differential of the two wings and the change of the center of gravity of the steering gear includes a lift system 1 , a transmission system 2 , a control system 3 and a power system 4 .
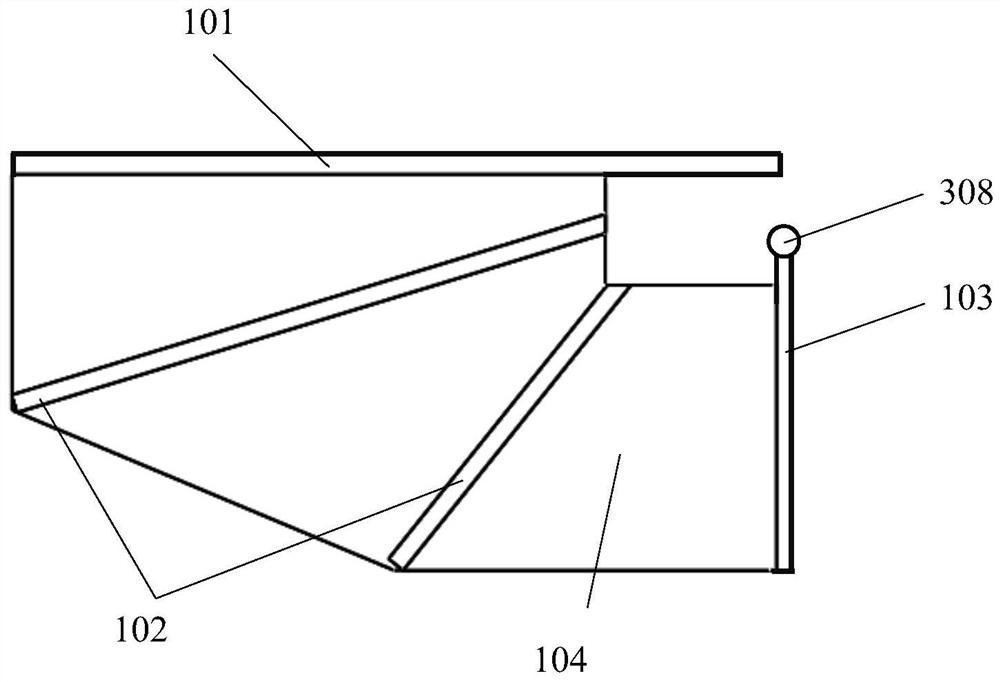
[0043] The lift system 1 is composed of two left and right flapping wings, the aerodynamic action points generated by the flapping wings do not coincide with the center of gravity, and each flapping wing is composed of a main beam 101, a flexible beam 102, a tension beam 103 and a membrane 104 . The wing membrane 104 is a flexible membrane made of polyimide material, and the front edge and the side edge of the wing membrane 104 are respectively wrapped into tubes and then fixed with an adhesive. The main beam 101 and the tension beam ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More