

Wearable walking assisting robot and hybrid assisting control method thereof
A control method and wearable technology, applied in the field of wearable robots and their control, can solve problems such as lack of prediction function, uncoordinated movement of walkers, and disordered timing of assisting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
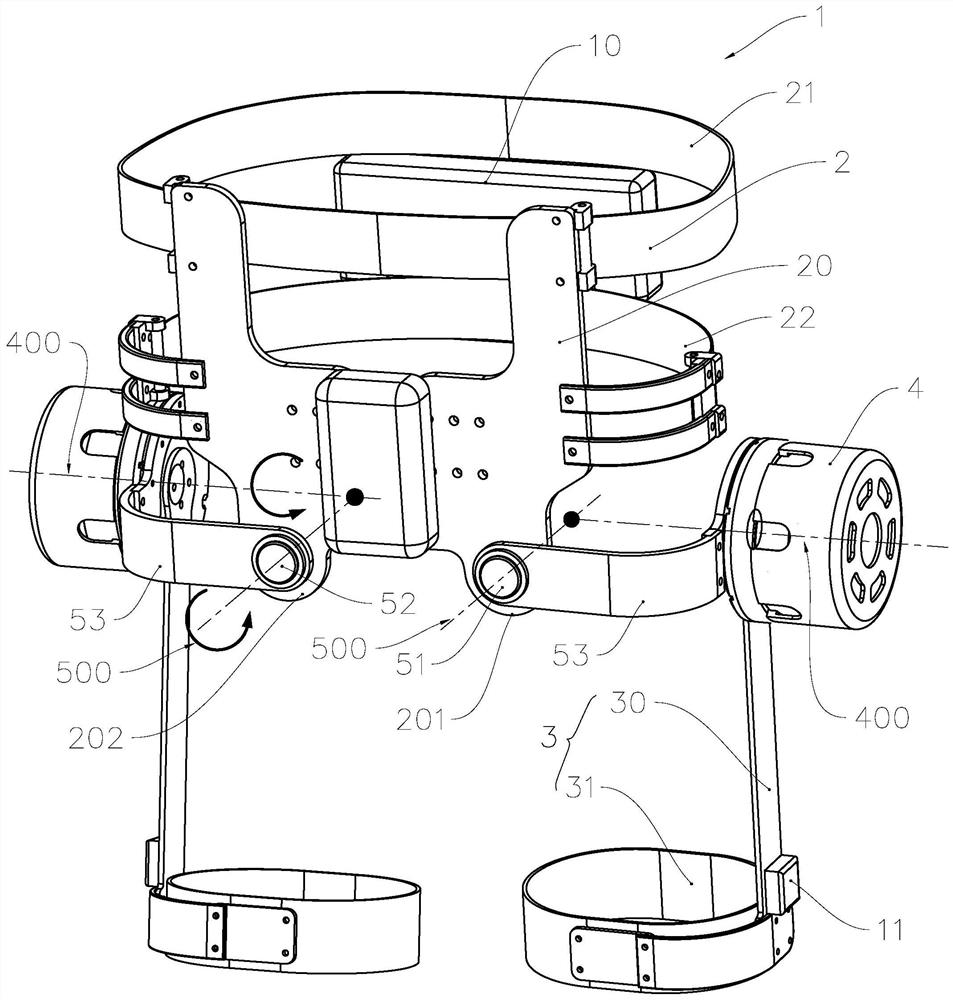
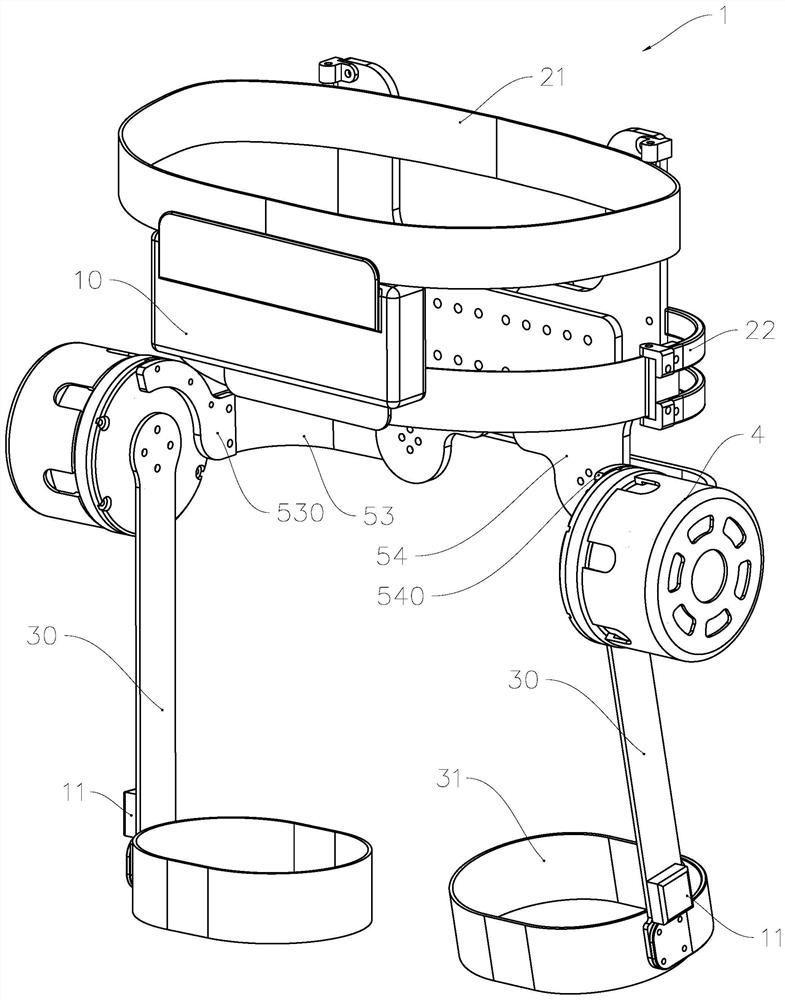
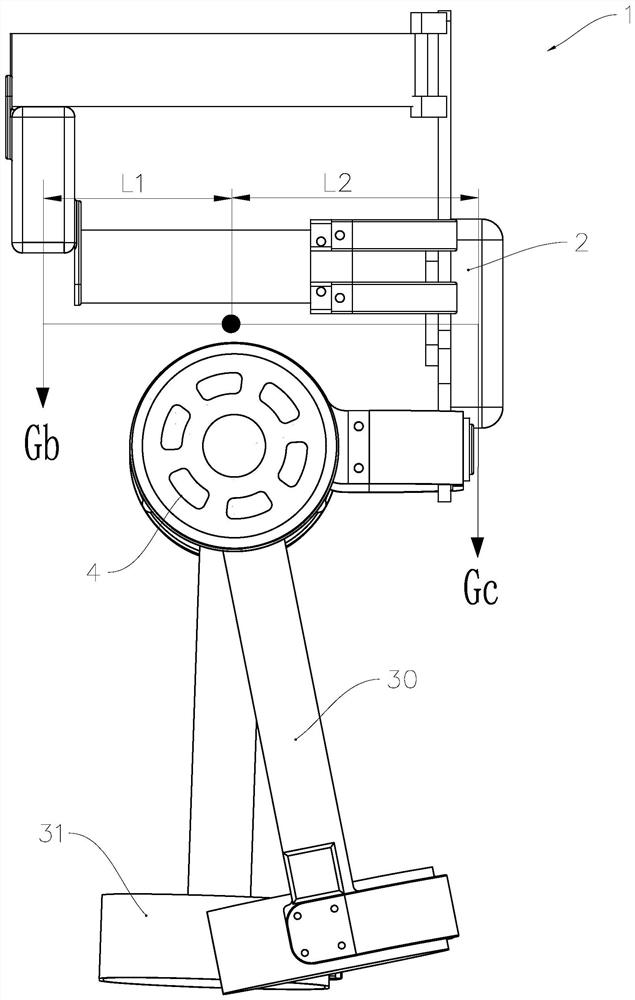
[0036] see Figure 1 to Figure 6 The wearable elderly walking assist robot 1 of the present invention includes a power supply battery module 10, a control module, a waist wearing unit 2, a thigh binding unit 3, and a hip joint flexion / extension drive for connecting the waist wearing unit 2 and the thigh binding unit 3 Unit; the thigh binding unit 3 includes a thigh bar 30 and a thigh strap 31, and a pose sensor 11 is arranged on the lower end of the thigh bar 30, and the pose sensor 11 outputs pose detection data to the control module during the assisting process; The hip joint flexion / extension drive unit includes a swing drive module 4, which is used to drive the thigh bar 30 to swing back and forth relative to the waist wearing unit 2, so as to provide swing assistance for the wearer's walking.
[0037] The waist wearing unit 2 includes a chest strap 21 and a waist strap 22 fixedly connected to the back bracket 20 of a plate structure and the back bracket 20. The power supp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More