

Rapid hand-eye calibration device and method based on standard ball binocular robot
A technology of hand-eye calibration and calibration method, which is applied in the field of robot calibration, and can solve the problems of relatively high precision and complexity of cameras and calibration targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
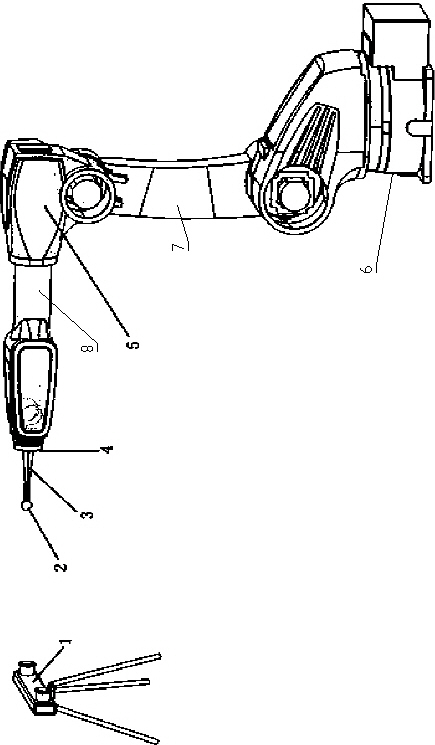
[0111] Such as Figure 1 to Figure 3 Shown, the fast hand-eye calibration device based on standard ball binocular robot of the present invention comprises base 6 and binocular camera 1, and base 6 is equipped with robot body 5 by mechanical arm 7, and robot body 5 passes transmission device 8 (as transmission rod) is connected with a flange 4, and the flange 4 is connected with a clamp 3, and the end of the clamp 3 is clamped with a standard ball 2; the shooting direction of the binocular camera 1 is toward the predetermined movement area of the standard ball 2;
[0112] The binocular camera 1, the mechanical arm 7 and the robot body 5 are all connected with the teaching pendant of the robot; the teaching pendant is connected with the computer; the robot coordinate system centered on the robot body 5 and the binocular The camera coordinate system centered on camera 1. The teaching pendant is the prior art, not shown in the figure.
[0113] The computer is also connected wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More