Venipuncture robot control method and device and computer readable storage medium
A technology of venipuncture and control method, which is applied in surgical robotics, computer-aided surgery, computer-aided planning/modeling, etc. Puncture robot and other problems, to achieve the effect of high accuracy, eliminating interference and reducing pain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
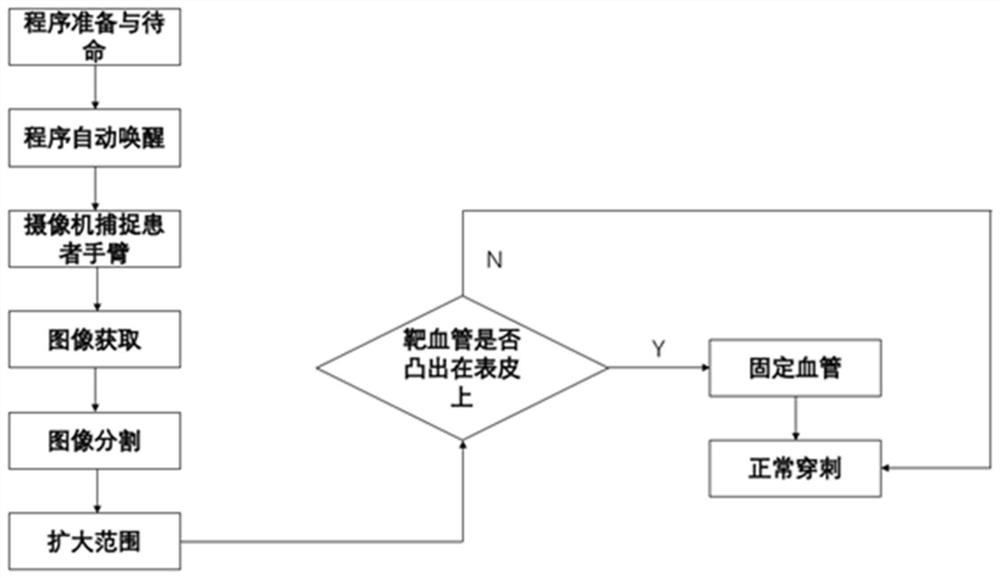
[0045] A control method for a venipuncture robot, which is implemented by a computer system in the form of a computer program, such as figure 1 shown, including:
[0046] (1) Standby wake-up step: before the patient reaches into the arm, the infrared camera and the ccd camera are in the standby state, the algorithm is in the off state, the ccd camera collects and previews visible light images, and inputs the collected preview visible light images to the trained arm perception model, obtain the recognition result of the arm perception model, and send a wake-up instruction for activati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com