

Anti-interference trajectory tracking control method for beacon vessel
A trajectory tracking and control method technology, applied in two-dimensional position/channel control, attitude control, adaptive control and other directions, can solve the problems of large control force, increase rudder loss, ignore ship-shore interaction, etc. The effect of short time and small overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
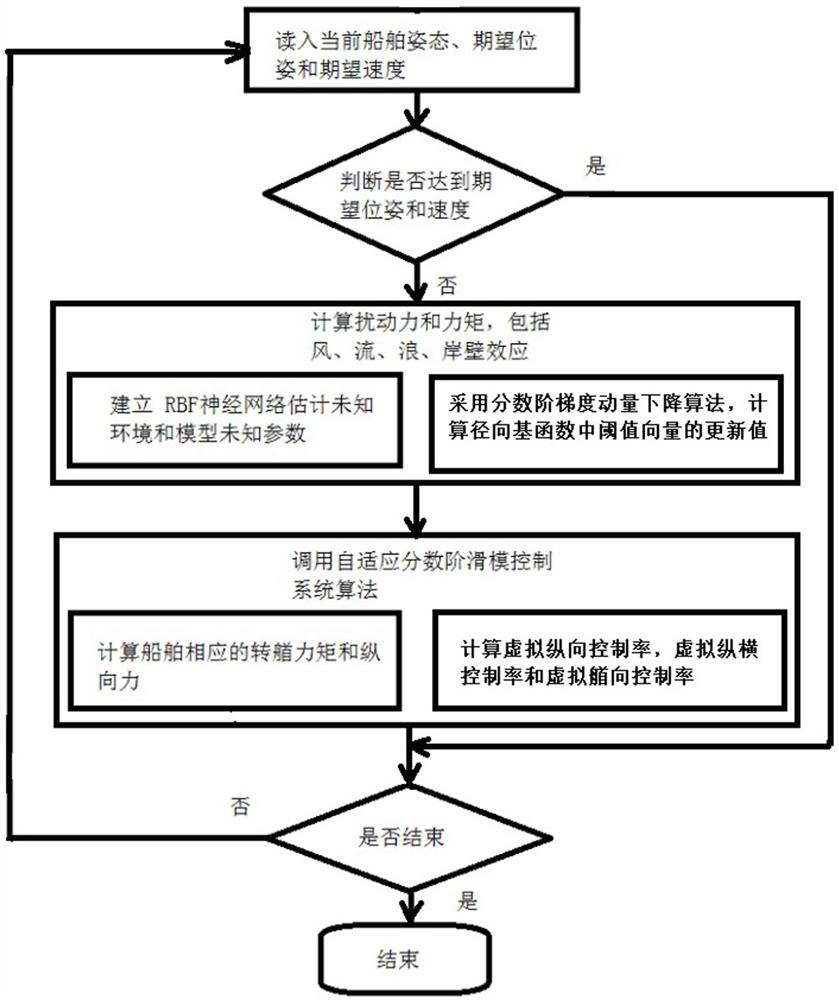
[0023] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0024] Such as figure 1 As shown, the present invention provides an anti-jamming trajectory tracking control method for a beacon ship, and designs an adaptive fractional-order sliding mode control method, which considers the wall effect and the interference of wind, current and wave on the ship's motion, and uses the radial basis function neural network to estimate Unknown parameters of the ship model, environmental disturbance, and trajectory tracking error; based on the Lyapunov stability theory, the trajectory tracking error converges to zero, thereby making the system rapidly asymptotically stable; the learning algorithm of the threshold vector in the radial basis function uses a fractional gradient Momentum Descent Algorithm. The specific implementation steps of this method are as follows:
[0025] Step S1, establishing an underact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More