

Palm manipulator combined by cross guide rod mechanism and dual-drive five-rod sliding block parallel mechanism
A dual-drive, manipulator technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high difficulty, large offset, and large eccentric force distance of the manipulator, achieving good versatility, small deviation, and high efficiency. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
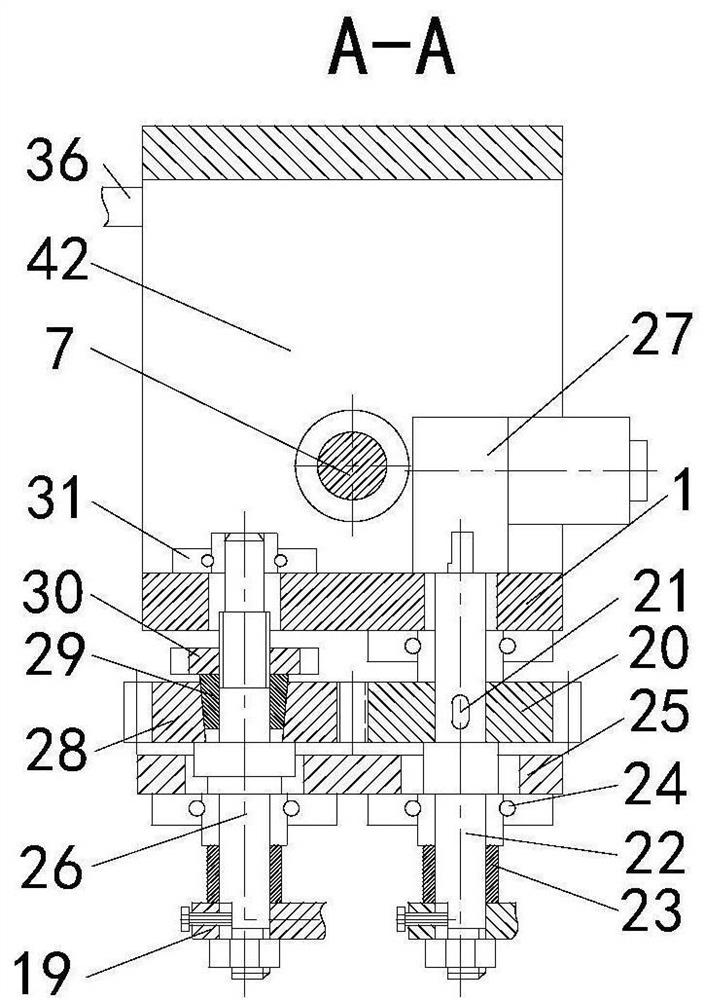
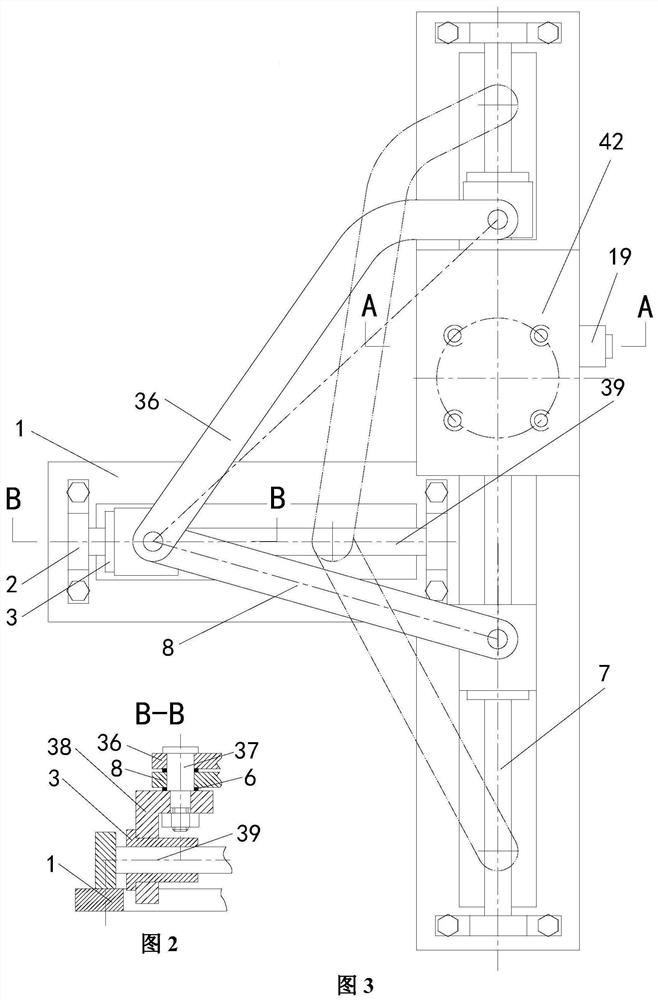
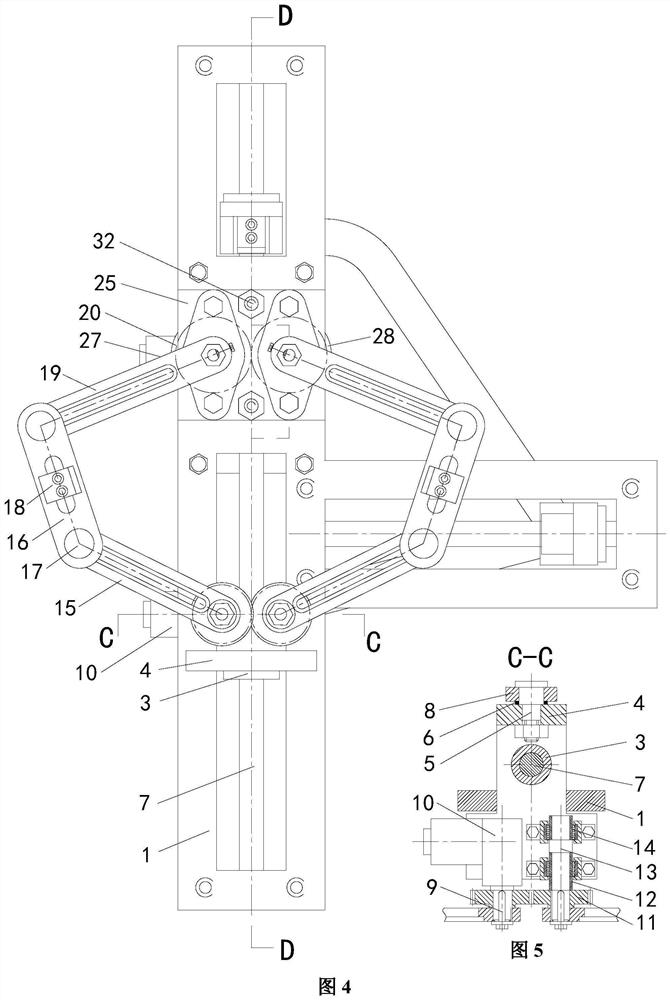
[0052] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
[0053] A palm manipulator combined with a cross guide mechanism and a double-drive five-bar slider parallel mechanism, including a base plate 1, a guide rail support 2, a linear bearing 3, a right-angle plate 4, a short pin shaft 5, a wear-resistant washer 6, and a long linear guide rail 7. Straight two-force rod 8, flat key 9, large motor worm gear reducer 10, pinion gear 11, short sleeve 12, rocker shaft 13, parallel belt seat bearing 14, double-slotted rocker 15, single-slotted connecting rod 16. Middle pin shaft 17, finger plate 18, double slotted crank 19, driving gear 20, short key 21, threaded head drive shaft 22, long sleeve 23, large bearing with seat 24, gear cover plate 25, threaded head driven Shaft 26, small motor worm gear reducer 27, tapered hole gear 28, taper sleeve 29, oblate nut 30, small belt seat bearing 31, guide stud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More