

Visual SLAM method based on semantic segmentation of deep learning
A technology of semantic segmentation and deep learning, applied in the field of computer vision sensing, it can solve the problems of different visual appearance, inability to realize loopback detection, etc., and achieve the effect of enhancing robustness, improving accuracy and excellent accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
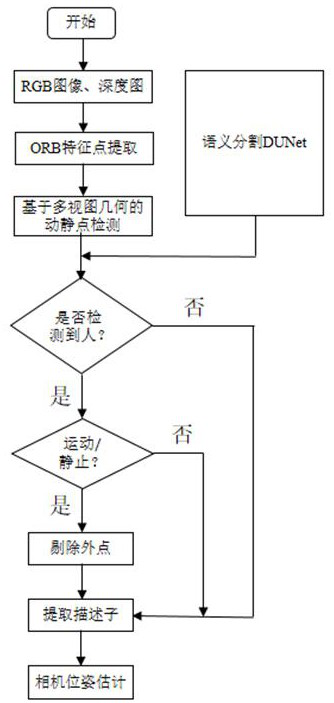
[0068] A visual SLAM method based on semantic segmentation of deep learning:
[0069] Step 1. After obtaining the image data collected by the RGB-D depth camera, extract the ORB feature points of the original RGB image, and use the DUNet semantic segmentation network to perform pixel-level semantic segmentation on the RGB image to obtain the semantic segmentation mask. The DUNet network model loaded in our visual SLAM system is trained based on the PASCAL VOC dataset, which can detect a total of 20 categories when used for segmentation tasks. If in the real application process, more than Pascal VOC data is encountered We can also use the larger MS COCO dataset to train our deep learning network. The input of the DUNet network is the original RGB image of size h×w×3, and the output of the network is a matrix of size h×w×n, where h represents the pixel height of the image, w represents the pixel width of the image, and n represents the Number of dynamic objects. For each outpu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More