

Unmanned vehicle drive-by-wire chassis teaching training platform and use method thereof
A training platform and technology for unmanned vehicles, applied in the field of unmanned vehicles, can solve the problem of not being able to solve the teaching and training work of the top-level control algorithm of the wire-controlled chassis. The training teaching platform has no extended communication interface and no functional scalability. and other problems, to achieve the effect of light weight, high transmission efficiency and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0046] This embodiment is based on a low-speed unmanned vehicle chassis, which can expand functions (including joint debugging and testing between multiple training units) through a communication interface, and has a rapid prototype controller for practical training and teaching platform.
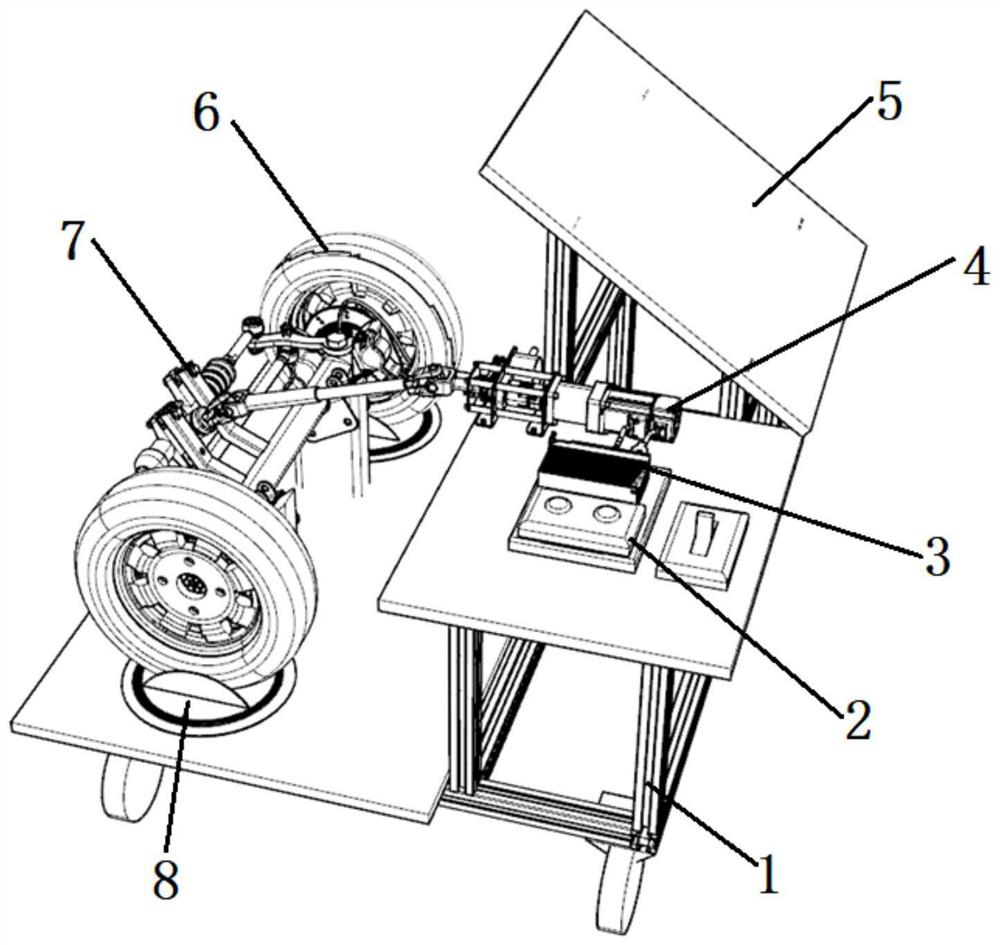
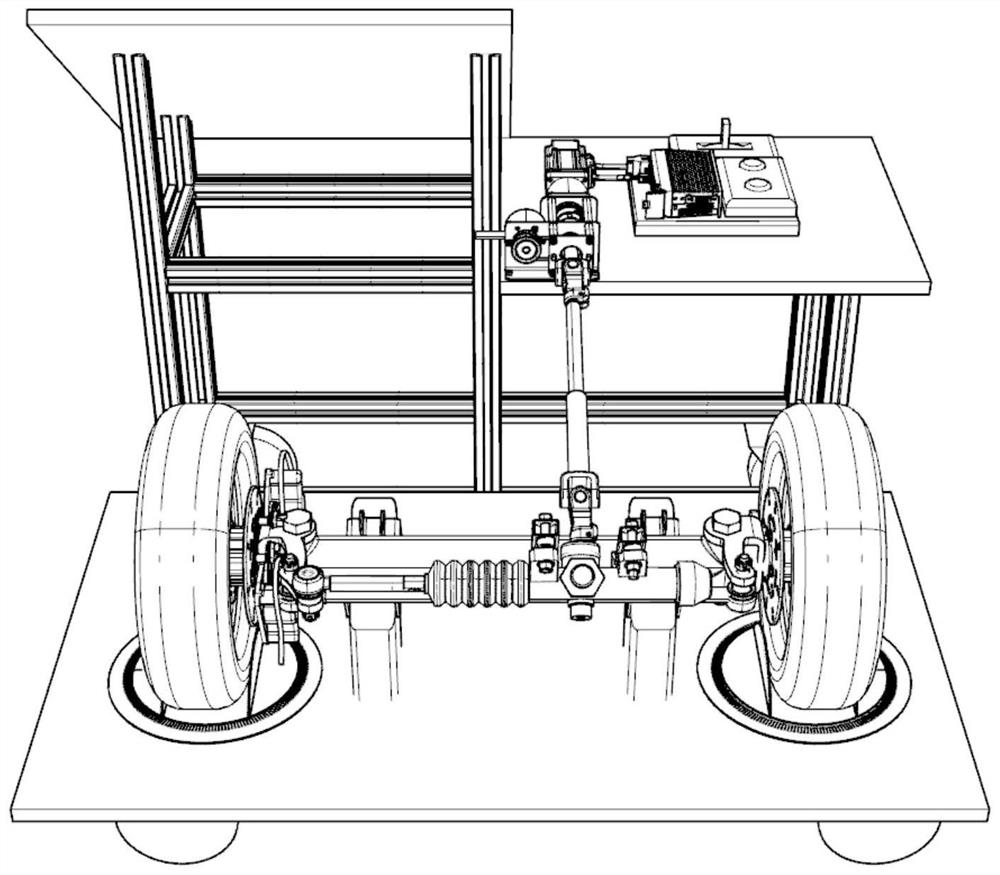
[0047] The teaching and training platform for the unmanned vehicle by wire chassis includes: a bracket 1 and an action execution module supported on the bracket 1 and a display teaching module; the action execution module is used to simulate the driving process of the unmanned vehicle. The action execution module includes: wire-controlled steering system, wire-controlled drive and braking system; the display teaching module is connected with the action execution module to output control instructions for controlling the action execution module, and at the same time receive and display the feedback from the action execution module The working parameters; it shows that there is an extended contro...
Embodiment 2
[0065] On the basis of the above-mentioned embodiment 1, the teaching and training platform for the unmanned vehicle by-wire chassis also includes: a sensor training module; A data transmission interface is reserved on the sensor module.
[0066] Specifically: the sensor training module includes: lidar perception training unit, camera perception training unit, millimeter wave radar / ultrasonic radar perception training unit;
[0067] The lidar perception training unit includes: lidar supported on the bracket, simulated obstacles, display teaching modules, and a power supply for powering the electronic devices on the bracket. The simulated obstacles include more than two simulated obstacles with different shapes and different materials; the laser radar is connected to the display teaching module to send the scanned real-time point cloud data to the display teaching module; the display teaching module has an Ethernet port reserved , you can upload lidar point cloud data to other...
Embodiment 3
[0075] On the basis of the above-mentioned embodiment 2, the training teaching platform also includes: joint debugging and joint test control module; through the joint debugging and joint test control module, the combined use of the action execution module and the sensor training module can be realized, which is used for more complex teaching and research work.
[0076] The function of the joint debugging and joint test control module is realized by the built-in program of the industrial computer supported on the bracket; the industrial computer is equipped with an automatic driving control program, a vehicle dynamics simulation program, and a recorded high-precision map.
[0077] The action execution module and the sensor training module can be connected to the joint debugging and joint test control module through their respective expansion interfaces. The joint debugging and joint test control module uses the built-in vehicle dynamics simulation program by fusing the informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More