

Vehicle following system and method for simulating driving style based on deep inverse reinforcement learning
A technology of reinforcement learning and simulated driving, applied in the field of car-following systems that simulate driving styles, can solve problems such as prediction result error, compound error, accumulation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0090] Embodiments of the present invention will be described in detail below in conjunction with examples, but those skilled in the art will understand that the following examples are only used to illustrate the present invention, and should not be considered as limiting the scope of the present invention.
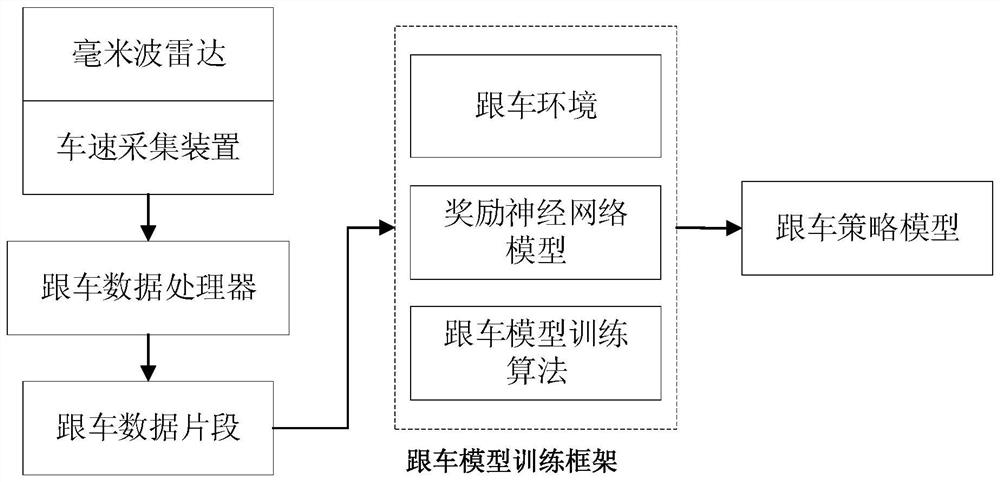
[0091] (1) Reference figure 1 , a car-following system based on deep inverse reinforcement learning to simulate driving style, including: millimeter-wave radar, vehicle speed acquisition device, vehicle-mounted industrial computer; wherein, the vehicle speed acquisition device is a vehicle speed sensor; vehicle-mounted industrial computer is integrated with car-following data processing device, data storage hard drive and follow-up model.
[0092] Among them, the millimeter-wave radar is used to collect the distance between the self-vehicle and the vehicle in front, the lateral distance between the self-vehicle and the The vehicle's lateral distance, relative speed, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More