

Novel hand exoskeleton rehabilitation device
A rehabilitation device and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of increasing system size, reducing practical application, and reducing applicability, and achieve strong safety, small adverse effects, and light weight Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical solutions and structural features of the present invention clearer, the technical solutions in the embodiments of the invention will be completely and clearly described below in conjunction with the accompanying drawings. Obviously, the described embodiments are only part of the embodiments of the present invention, rather than All examples. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
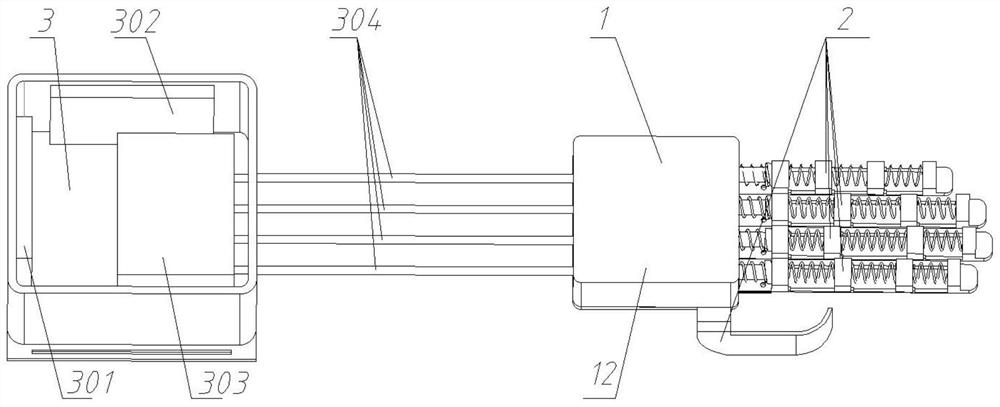
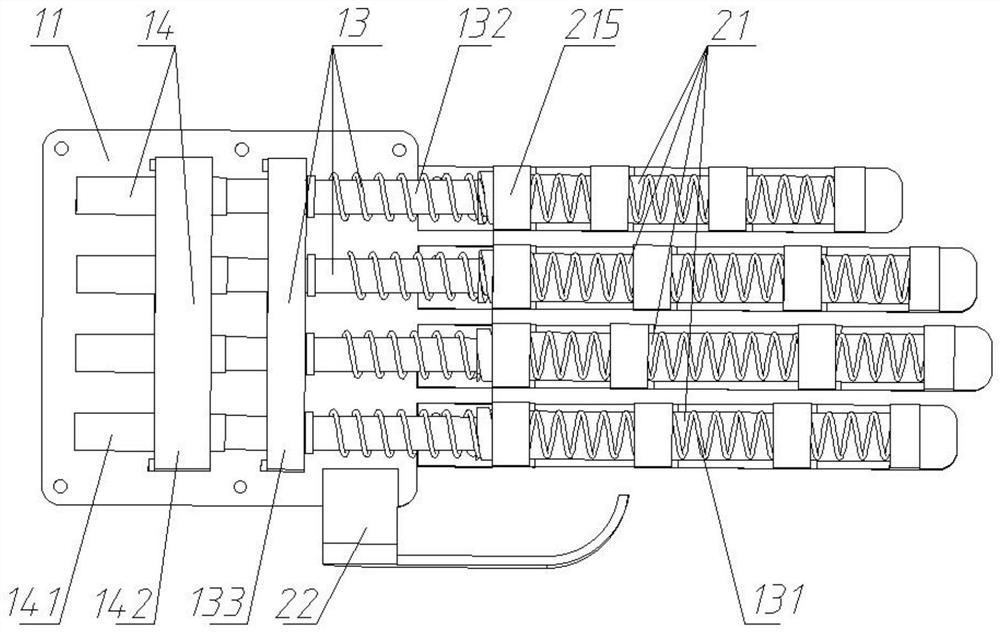
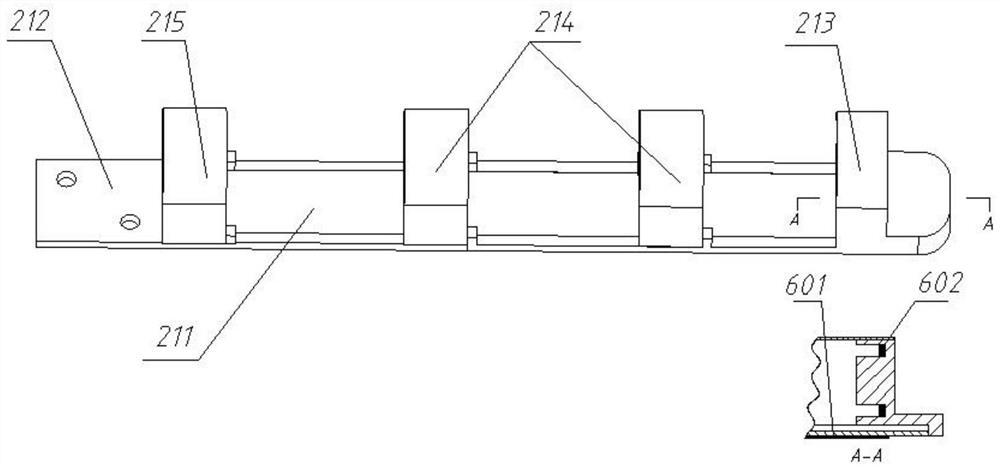
[0015] Such as figure 1 As shown, a novel hand exoskeleton rehabilitation device according to the embodiment of the present invention, the device includes a palm part (1), a finger part (2), a control device (3), and a detection device (4) four part; wherein the control device (3) includes a motor drive controller (301), a signal acquisition device (302), a battery (303), and a cable (304).
[0016] Such as figure 1 , fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More