Variable-stiffness joint with symmetrical compression springs
A compression spring and variable stiffness technology, applied in the field of bionic robots, can solve the problems of narrow adjustment stiffness range, low output torque, and low integration, and achieve the effects of wide stiffness adjustment range, simple and reliable structure, and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Embodiments of the present invention are described in detail below, and examples of the illustrated embodiments are illustrated in the drawings, wherein like or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
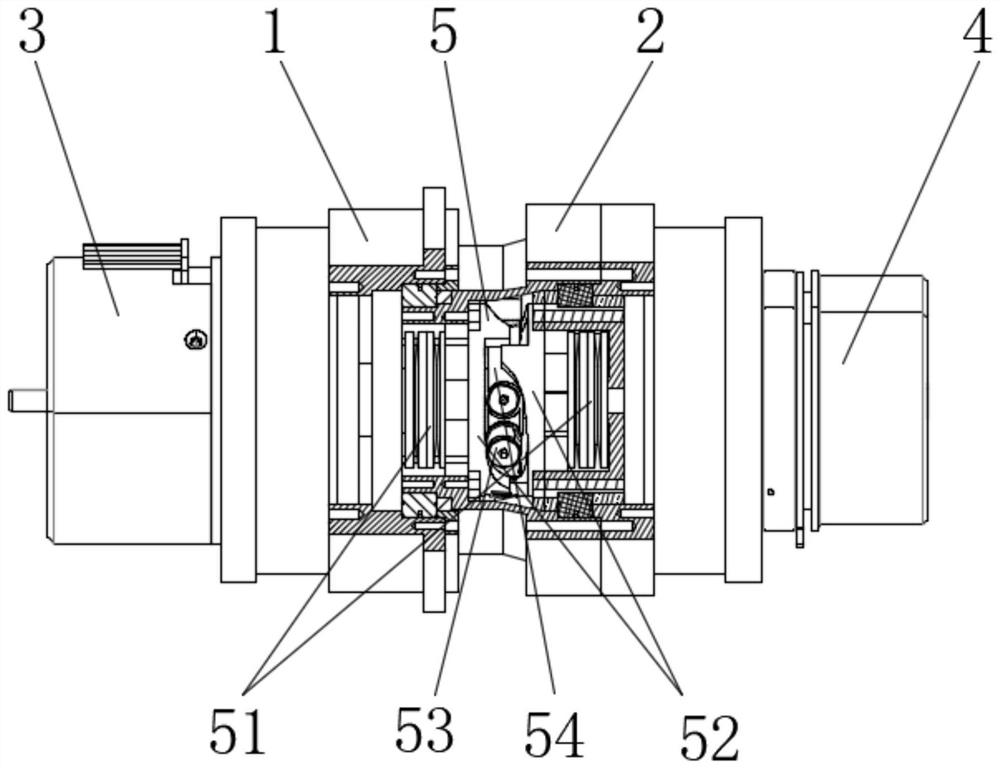
[0033] Such as figure 1 The variable stiffness joint shown includes a base 1, a joint link 2, a position motor 3, a stiffness motor 4 and a stiffness adjustment module 5; the position motor 3 is fixed on one side of the base 1, and the other side of the base 1 is connected to a joint The link 2 and the stiffness adjustment module 5 are arranged between the base 1 and the joint link 2, the joint link 2 can rotate relative to the base 1 through the stiffness adjustment module 5, and the side of the joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More