

Wheel-leg hybrid drive type mining metamorphic robot
A technology of hybrid drive and robot, applied in motor vehicles, transportation and packaging, etc., can solve problems such as high flexibility, difficult structure, obstacle-surpassing ability and stability defects, etc., and achieve simple structure, low economic cost and combination The effect of easy form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
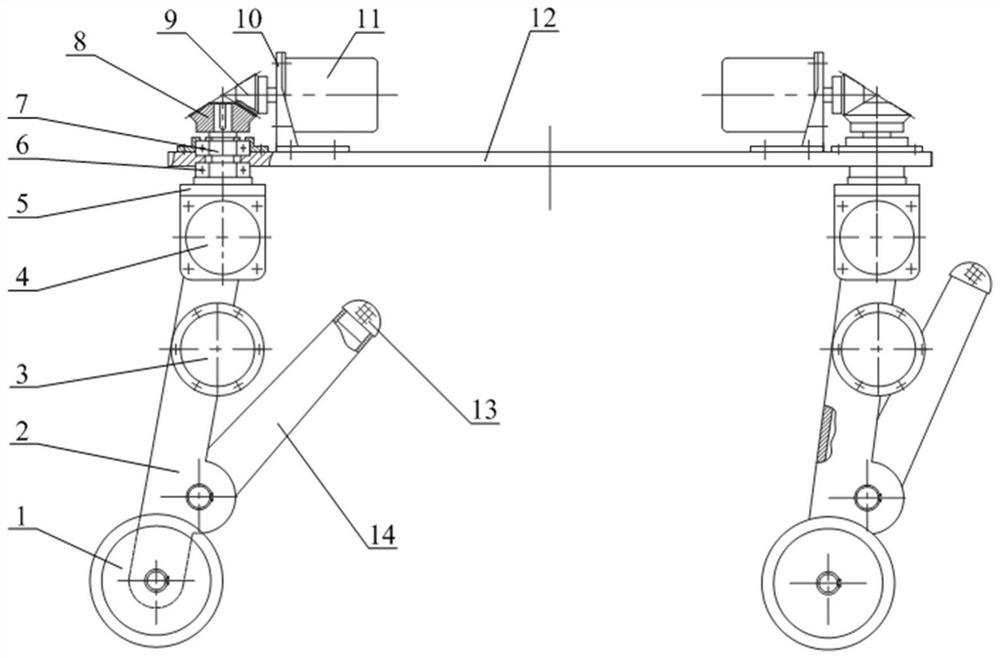
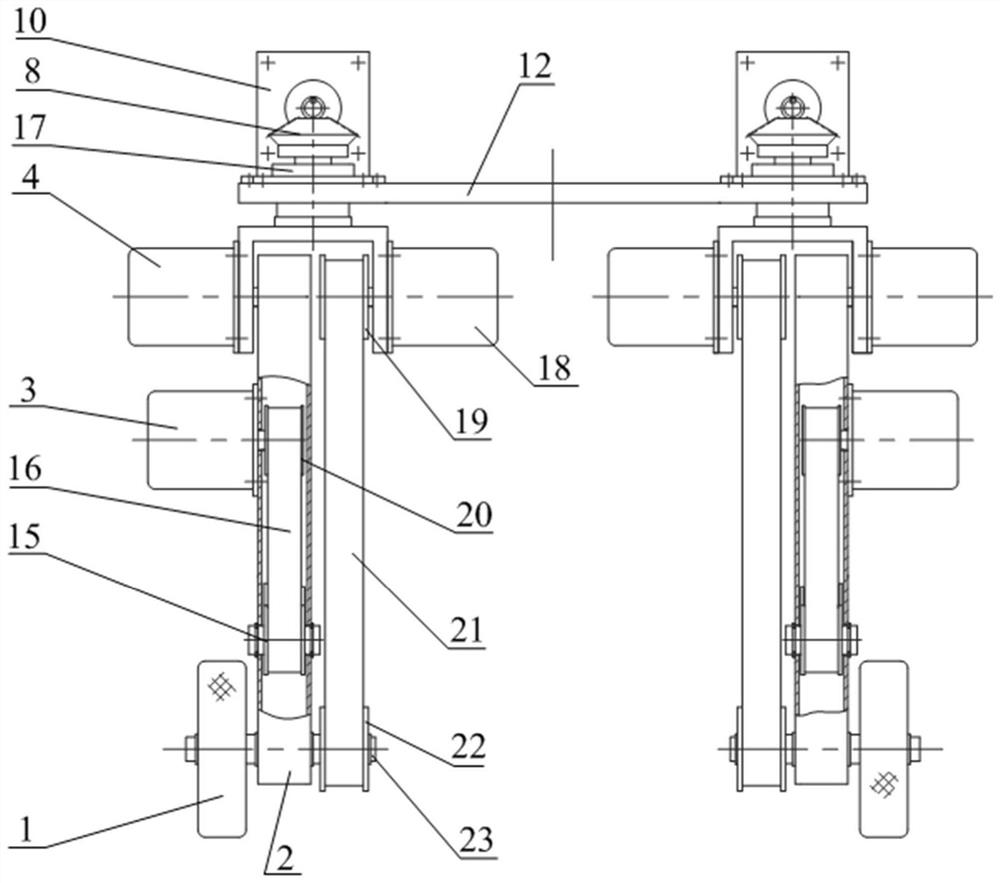
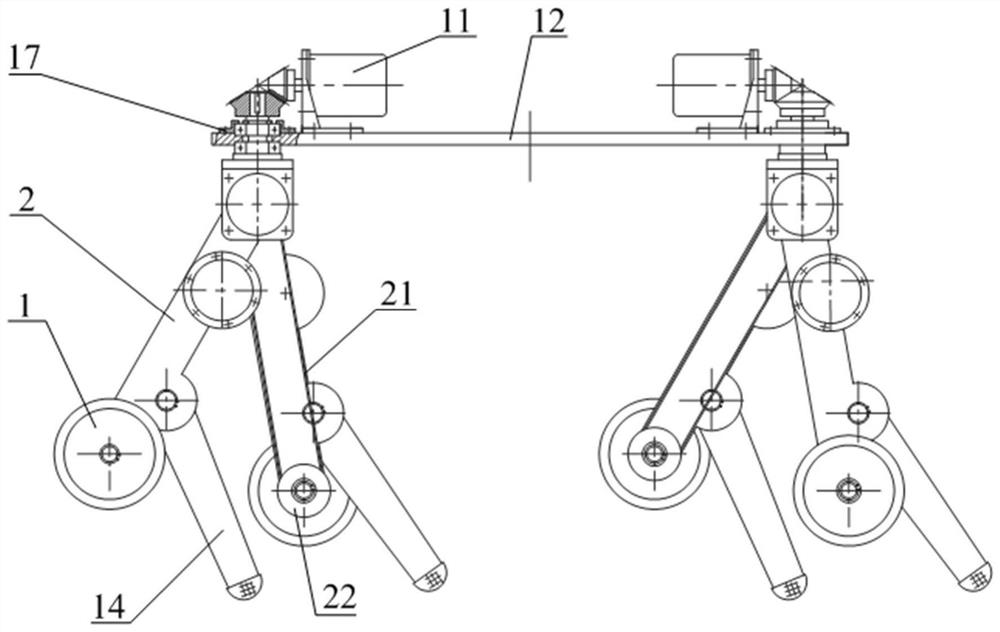
[0030] Such as Figure 1-Figure 4 As shown, the present invention is a kind of wheel-leg hybrid-driven mine metamorphic robot, which consists of a carrying platform (chassis), four wheel-leg walking mechanisms with the same structural size, and each wheel-leg walking mechanism includes a wheel-leg walking mechanism. Branch chain and a steering gear.
[0031] The carrying platform 12 is a planar plate structure, which can be made of ordinary plate materials and is easy to process and manufacture.
[0032] The wheel leg branch chain includes a support 5, a thigh bar 2, a shank bar 14, a wheel 1, three motors and two pulley assemblies.
[0033] The support 5 is designed as a U-shaped structure, which is convenient for fixing the motor two 4 and the motor four 18 on its two outer sides respectively. The axis of described motor two 4 and motor four 18 coincides, to guarantee thigh bar 2 and the synchronous rotation of the belt transmission mechanism that is made up of pulley thre...
Embodiment 2
[0041] A wheel-leg hybrid-driven mining metamorphic robot of the present invention can realize height adjustment of the robot carrying platform (chassis), straight or oblique movement during wheel-type movement, and human-like walking or insect-like walking during leg-type movement. For the movement forms such as crawling, the operation procedures of other wheel leg branches and steering devices are similar to the operation procedures of the driving operation steps of one wheel leg branch chain and steering device, and the realization of the aforementioned functions will be described.
[0042] 1. Height adjustment of the carrying platform (chassis): When the wheel is moving, such as figure 1 As shown, the rotation angle of the thigh rod 2 driven by the motor 2 can realize the height adjustment of the robot system carrying platform (chassis); image 3 , Figure 4 As shown, the rotation angle change of the thigh rod 2 driven by the motor two 4 and the rotation angle change of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More