Amphibious vehicle layout area utilization maximization method based on multi-strategy dynamic adjustment
A dynamic adjustment and multi-strategy technology, applied in the field of amphibious assault ship vehicle compartment vehicle layout, can solve the problems of waste of free area, slow algorithm convergence speed, and reduced algorithm space search ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
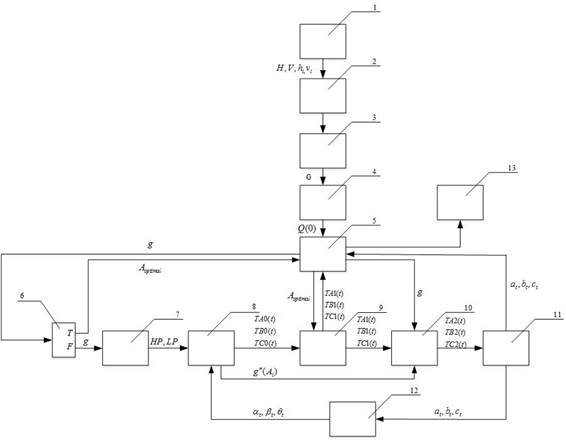
[0077] figure 1 It is the overall structural diagram of the layout of vehicles on the vehicle cabin deck based on the minimum horizontal line algorithm of the matching degree and the multi-strategy dynamic adjustment genetic algorithm of the present invention, including: obtaining the size unit (1) of the amphibious vehicle and the layout space; defining the layout of the amphibious vehicle Constraint condition unit (2); determine the objective function unit of vehicle layout (3); vehicle coding and initial population generation unit (4); vehicle layout multi-strategy genetic algorithm fitness value calculation and save the optimal individual unit (5) Vehicle layout optimization algorithm stop judging unit (6); Vehicle layout multi-strategy genetic algorithm popul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



