Unmanned aerial vehicle ground detection method and system based on confidence
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A confidence, machine pair technology, applied in the field of computer vision, can solve the problems of difficult target detection algorithm, immature detection technology, low carrying weight of UAVs, etc. Effect
Active Publication Date: 2021-03-12
NAT INNOVATION INST OF DEFENSE TECH PLA ACAD OF MILITARY SCI
View PDF2 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] UAV is a reusable aircraft controlled by radio remote control or autonomous program, unmanned, it has simple structure, low cost, strong survivability, good maneuverability and can complete various types of tasks Advantages; but the low weight of the UAV prevents it from carrying powerful computing equipment, which makes it difficult to deploy target detection algorithms based on deep neural networks, and the weight of small UAV onboard computers such as Raspberry Pi or odroid Lightweight and limited computing power; even if TinyYOLO or Mobilenets-SSD in the faster one-step method is deployed on the odroid airborne computer, the target detection speed does not exceed 3FPS, which cannot meet the real-time requirements
The decommissioned Predator UAV mainly uses the UAV's sensor to obtain data and send it back to the ground for manual interpretation on the ground; the improved "Global Hawk" can carry signal sensors and radars for detecting ground moving targets. On-board target detection and monitoring capabilities (distinguish between motion and static, detect moving targets), and the detection technology is not mature enough; Rainbow drones obtain data from the drone's sensors and send them back to the ground, where they are manually interpreted on the ground and further processed at the back end; artificial intelligence algorithms are used in " Scanning Eagle” was tested. Only a few days after the start of the test, the accuracy of the computer’s recognition of people, vehicles, buildings and other objects reached 60%, and it increased to 80% after 1 week. However, this application is still done on the ground From this point of view, the current technology is still unable to track and detect the target in the data collected by the drone's onboard camera in real time and perform the processing operation of the next step instruction
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
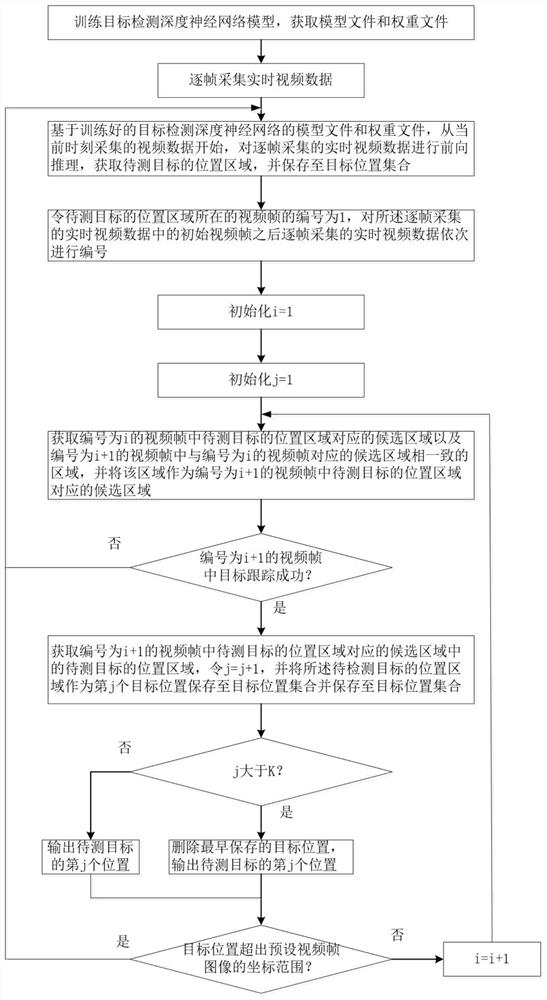
[0074] The invention provides a confidence-based UAV ground detection method, such as figure 1 shown, including:
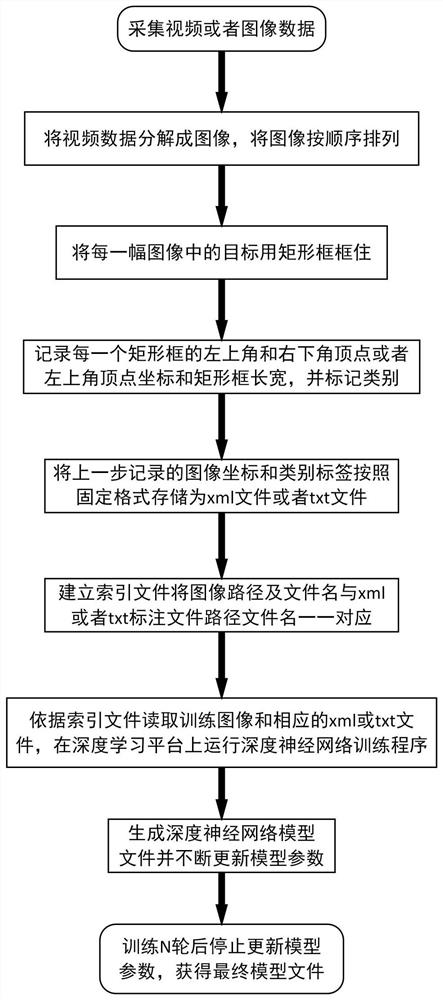
[0075] Step (1) train target detection deep neural network model, obtain model file and weight file;
[0076] Step (2) collects real-time video data frame by frame;
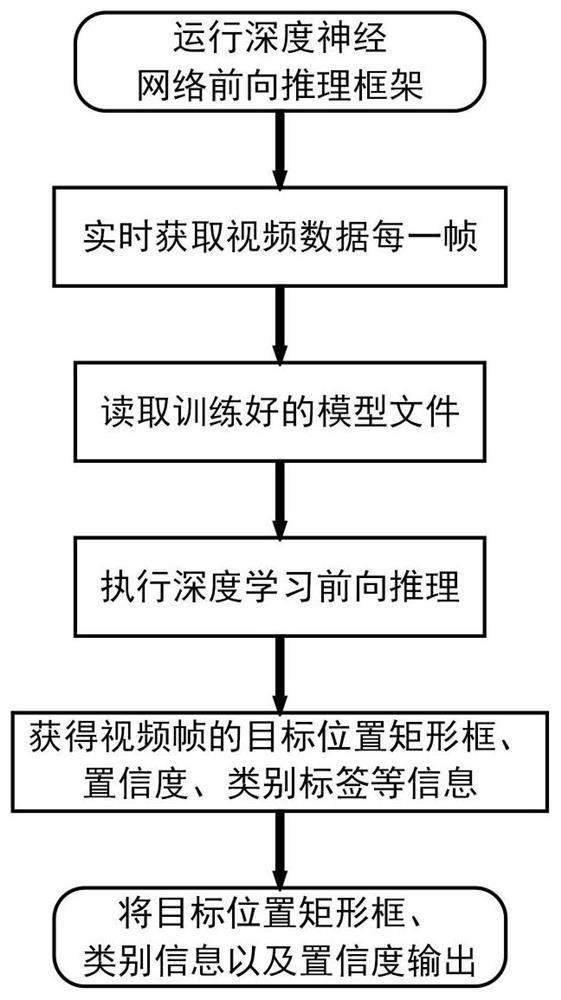
[0077] Step (3) Based on the model file and weight file of the trained target detection deep neural network, start from the video data collected at the current moment, and perform forward reasoning on the real-time video data collected frame by frame to obtain the location area of the target to be tested, And save to the target location collection;
[0078] Step (4) makes the numbering of the video frame where the location area of the target to be measured be 1, and the real-time video data collected frame by frame after the initial video frame in the real-time video data collected frame by frame is numbered successively;
[0079] Step (5) initialize i=1;
[0080] Step (6) initialization j=1;...
Embodiment 2
[0145] This embodiment provides a confidence-based UAV ground detection system, such as Figure 5 shown, including:
[0146] The training module is used to train the target detection deep neural network model, and obtain the model file and weight file;
[0147] The collection module is used to collect real-time video data frame by frame;
[0148] The detection module is used to detect the model file and weight file of the deep neural network based on the trained target. Starting from the video data collected at the current moment, it performs forward reasoning on the real-time video data collected frame by frame to obtain the location area of the target to be tested. , and save to the target location set;
[0149] The numbering module makes the numbering of the video frame where the location area of the target to be measured is 1, and the real-time video data collected frame by frame after the initial video frame in the real-time video data collected frame by frame is se...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to an unmanned aerial vehicle ground detection method and system based on confidence, and the method comprises the steps: carrying out the forward reasoning of video data collected frame by frame based on a model file and a weight file of a trained target detection deep neural network, and obtaining a position region of a to-be-detected target, obtaining a candidate region corresponding to the position region of the to-be-detected target in the current video frame and a region consistent with the candidate region corresponding to the current video frame in the next videoframe, determining the position region of the to-be-detected target, taking the position region of the to-be-detected target as a target position, storing the target position in a target position setand carrying out outputting. According to the technical scheme provided by the invention, the video acquired by the unmanned aerial vehicle in real time is monitored by adopting the deep neural network target detection method, the detection efficiency of the unmanned aerial vehicle is improved, and the method and system have important application value.
Description
technical field [0001] The invention relates to the technical field of computer vision, in particular to a method and system for ground detection of an unmanned aerial vehicle based on confidence. Background technique [0002] The current deep neural network is developing rapidly and its application is becoming more and more extensive. The method of using deep neural network for target detection or search on video or image mainly includes the two-step method represented by Faster R-CNN, R-CNN, etc. and YOLO , SSD, etc.; although Faster R-CNN is an excellent algorithm in the two-step method, it can only achieve a processing speed of 5FPS with the support of the powerful computing power of the K40 GPU, which cannot meet the real-time requirements; although the one-step method The speed of YOLO and SSD target detection can reach more than 15FPS to meet the real-time requirements, but it must be supported by the computing power of Titan X or M40GPU. The algorithm with better pe...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More