

Greenhouse multifunctional operation platform and control method thereof
A technology for greenhouses and working platforms, which is applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., can solve problems such as low intelligence, low efficiency, and poor leaf penetration. Achieve the effect of high degree of intelligence, reduce labor costs, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
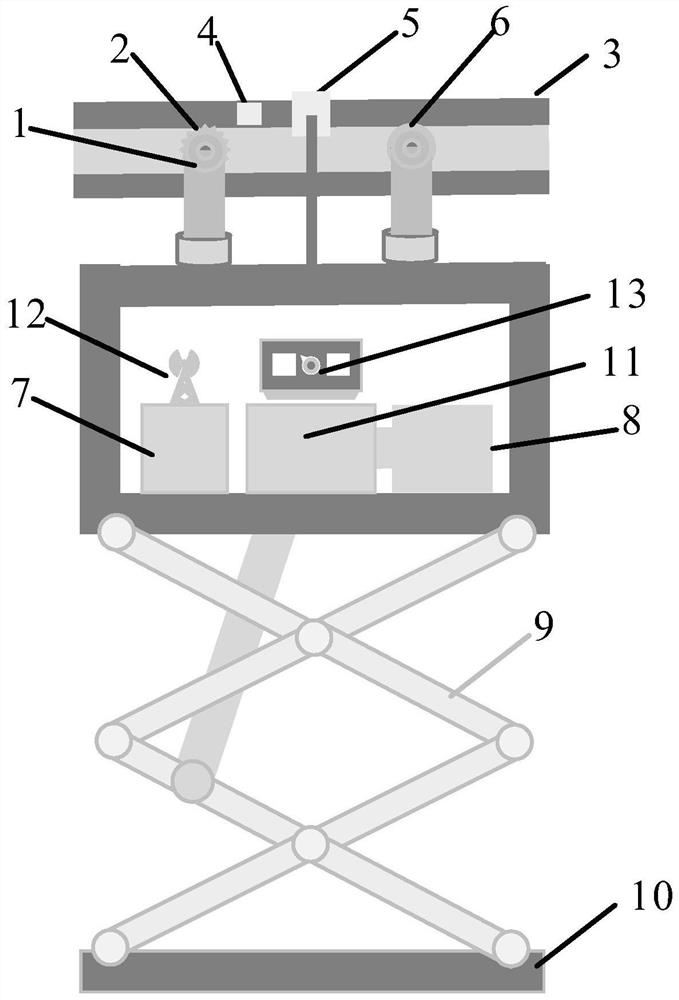
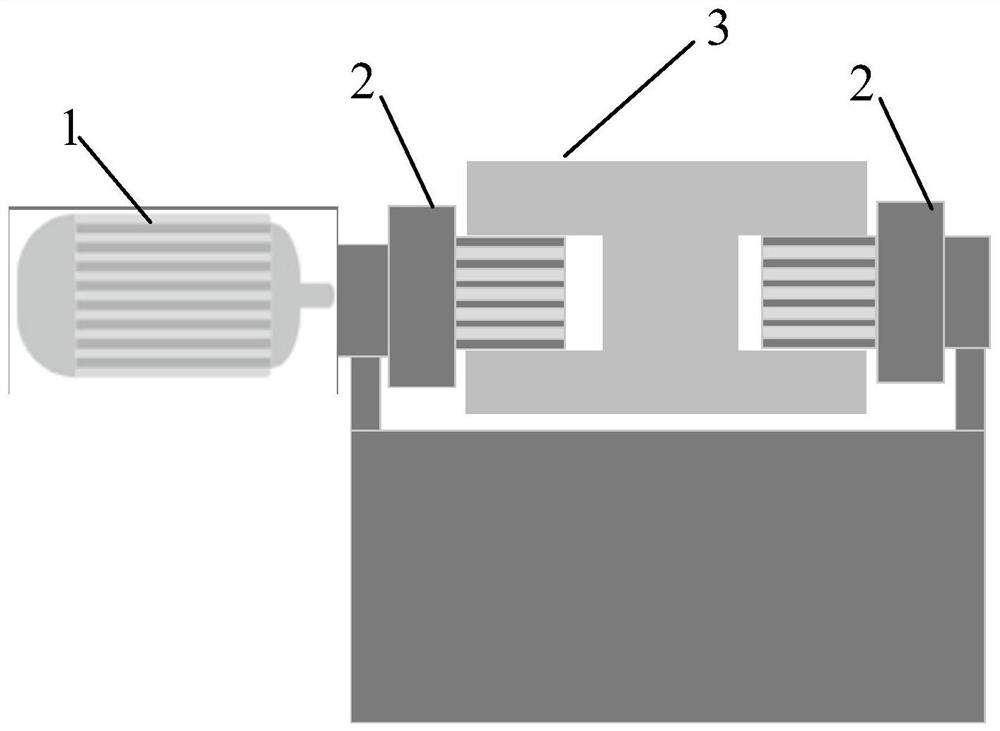
[0046] Embodiment 1: including a remote control mode, operating a remote control, and a wireless remote control control system for the remote control, the control system controls the motion of the motor 1 of the mobile device through the motor controller, thereby realizing the traveling motion of the mobile device, wherein the traveling motion includes advancing along the running track And backward, the action of the lifting device is wirelessly controlled by the remote control, so as to realize the lifting action of the working device on the mounting platform, and the start and stop of the working device are wirelessly controlled by the remote control.
Embodiment 2
[0047] Embodiment 2: The difference from Embodiment 1 is that the control method further includes a learning mode. After entering the learning mode, the action of the mobile device is controlled by the remote controller. The learning mode obtains the path information of the track layout, and the path information includes The arrangement order of the identification cards and the information on the number of rotations of the motor 1 when the mobile device travels the road section between two adjacent identification cards, the arrangement order of the path information is the identification card 1, the number of rotations of the motor 1, the identification card 2, the motor The number of rotations 2, the identification card 3, the number of rotations of the motor 3..., after the path information is formed, the path information is sent to the remote control through the wireless communication system.
[0048] Optimally, the method for obtaining path information in the learning mode i...
Embodiment 3
[0051] The difference between the third embodiment and the second embodiment is that the control method further includes a navigation mode. After entering the navigation mode, the control system receives the target path information and controls the mobile device to travel according to the target path until it runs according to the target path. After complete, stop, the target path is set by the remote controller and sent to the control system through the wireless communication system, the target path includes two types, the type one includes a plurality of identification cards arranged in sequence, and includes the operation device Work attribute and lifting device lifting attribute, such as the target path is: {(identification card 1, work attribute, lifting attribute), (identification card 2, work attribute, lifting attribute), (identification card 3, work attribute, lifting attribute)… ...}, the final stop point of the target path of type 1 is the position of a certain ident...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More