Intelligent networked automobile system cooperative control method based on TPZN
A technology of collaborative control and intelligent control system, which is applied to services, transmission systems, general control systems, etc. based on specific environments, to achieve the effect of improving safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
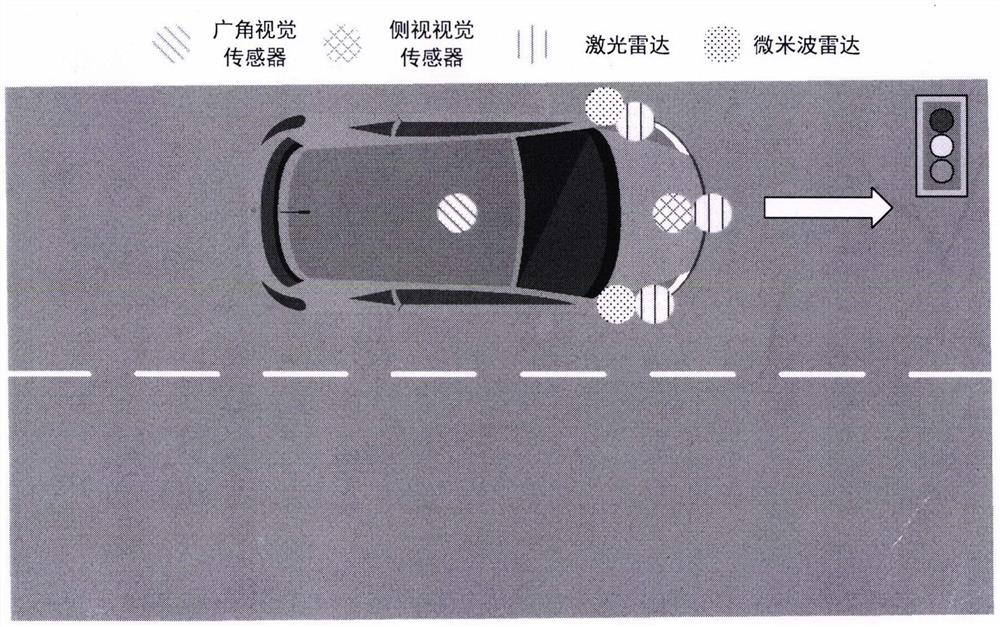
[0038] Embodiment: For the forward driving of unmanned intelligent networked vehicles, combined with figure 2 , assuming that there are three laser radars (Lidar) on the front left, front center, and front right of an intelligent networked car body, two millimeter-wave radars (Radar) on the front left, and front right, and two wide-angle and front-end vision sensors. Sensor (Vision); the car contains intelligent control systems such as image recognition subsystems, radar subsystems, and brake control subsystems; system; the described intelligent networked vehicle system is composed of the vehicle-mounted ad hoc network of the intelligent networked vehicle and the vehicle electronic control unit and intelligent control system respectively connected to it; the described vehicle-mounted ad hoc network is composed of multiple vehicle-mounted Networking of short-range communication devices can realize communication between vehicles and between vehicles and roads; the automotive el...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com