Stair detection method and device and mobile robot
A mobile robot and detection method technology, applied in the field of environmental perception, can solve problems such as the lack of detection stairs and the inability to ensure the movement of mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
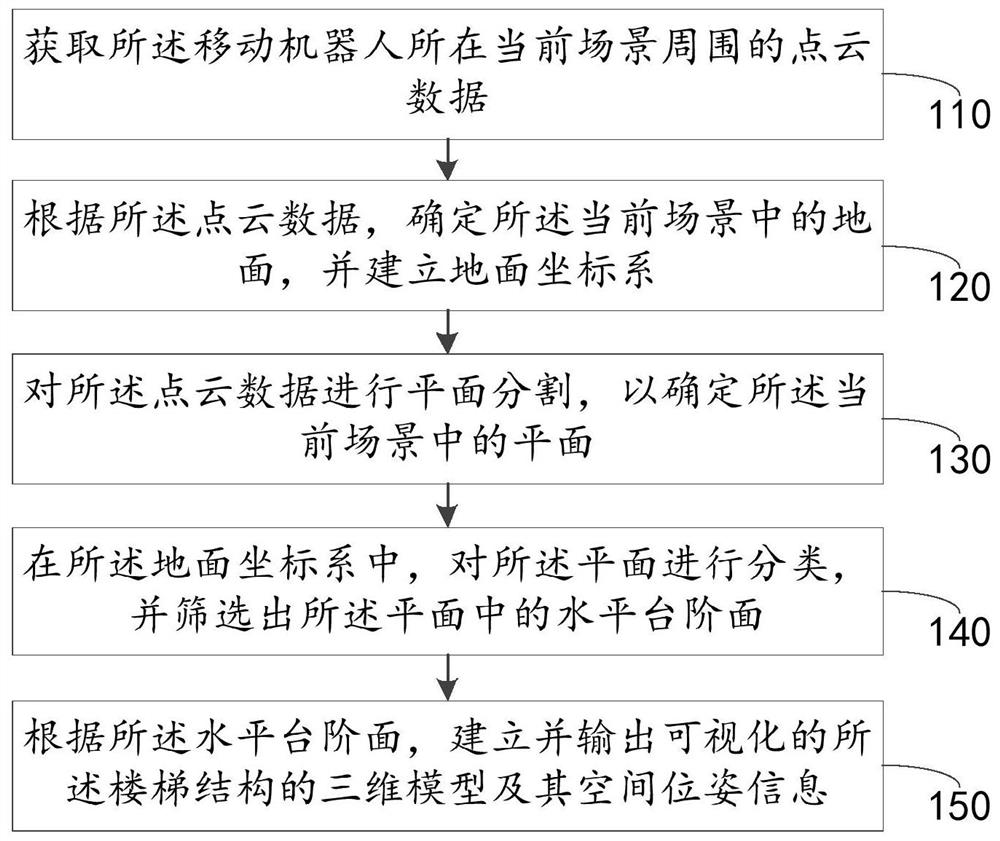
[0077] The embodiment of the present invention provides a staircase detection method, please refer to figure 2 , which shows a flow chart of a stair detection method provided by an embodiment of the present invention, the stair detection method can be applied in the above application scenarios and figure 1 In the described mobile robot, the method includes but is not limited to the following steps:
[0078] Step 110: Obtain point cloud data around the current scene where the mobile robot is located;
[0079] In the embodiment of the present invention, the depth camera as described in the above application scenario can be used to collect the point cloud data. Preferably, the depth camera adopts an RGB-D camera, which has depth information perception capabilities and color information perception capabilities. Ability to provide fast and stable geometric reconstruction capabilities on single frame data. And, the way to obtain the point cloud data around the current scene where...
Embodiment 2
[0153] The embodiment of the present invention provides a stair detection device, please refer to Figure 8 , which shows the structure of a stair detection device provided in an embodiment of the present invention, the stair detection device 200 includes: a data acquisition module 210, a ground detection module 220, a scene segmentation module 230, a stair detection module 240 and a stair modeling Module 250. in,
[0154] The data acquisition module 210 is configured to acquire point cloud data around the current scene where the mobile robot is located;
[0155] The ground detection module 220 is configured to determine the ground in the current scene according to the point cloud data, and establish a ground coordinate system;
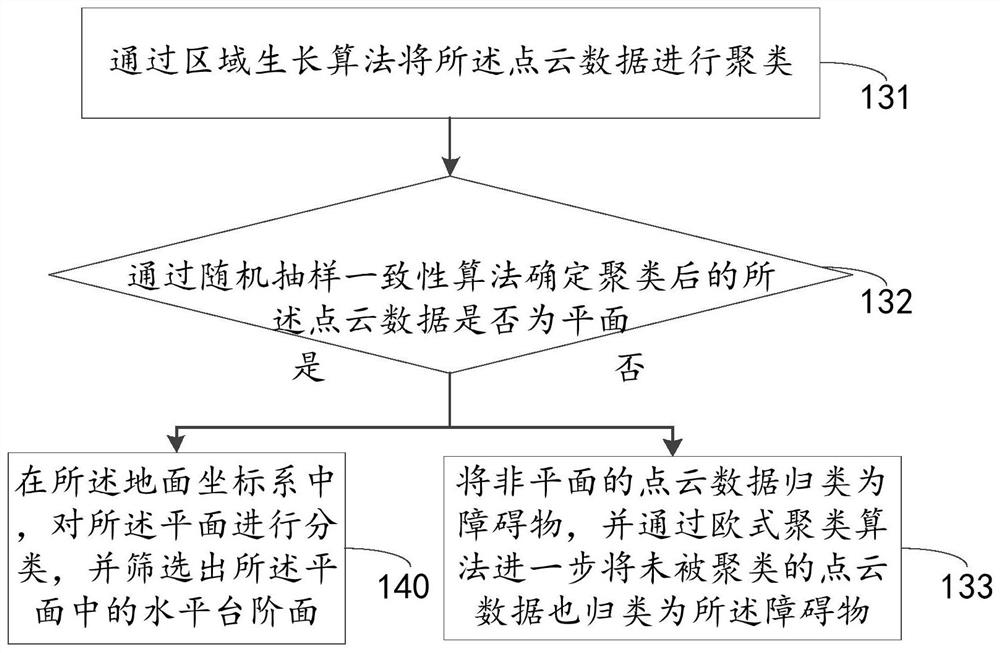
[0156] The scene segmentation module 230 is configured to perform plane segmentation on the point cloud data to determine the plane in the current scene;
[0157] The staircase detection module 240 is configured to classify the planes in the ground...
Embodiment 3
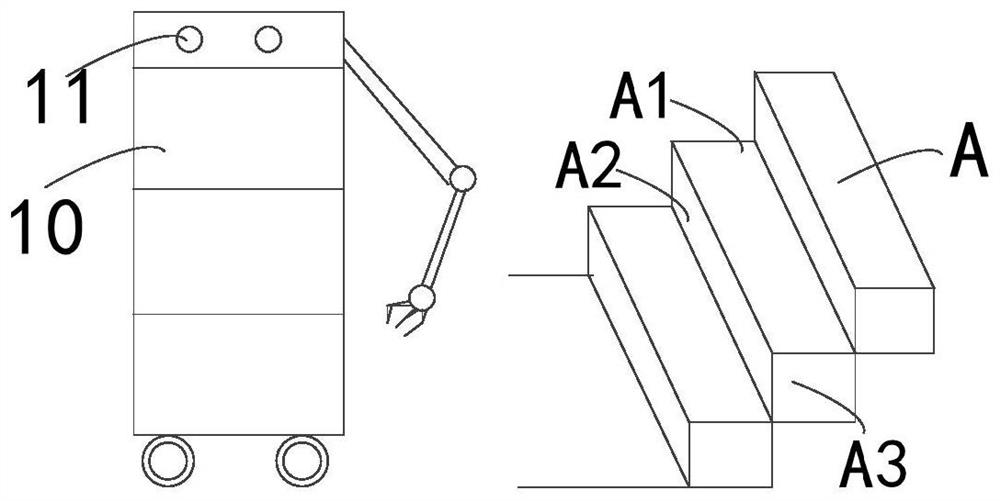
[0165] The embodiment of the present invention also provides a mobile robot, please refer to Figure 9 , which shows the ability to execute Figure 2 to Figure 7 The hardware structure of the mobile robot of the staircase detection method. The mobile robot 10 may be figure 1 The mobile robot 10 is shown. The mobile robot 10 includes a depth camera 11 mounted on the mobile robot 10 .
[0166] The mobile robot 10 also includes: at least one processor 12 connected to the depth camera 11; and a memory 13 communicated with the at least one processor 12, Figure 9 A processor 12 is taken as an example. The memory 13 stores instructions executable by the at least one processor 12, the instructions are executed by the at least one processor 12, so that the at least one processor 12 can perform the above-mentioned Figure 2 to Figure 7 The described staircase detection method. The processor 12 and the memory 13 may be connected via a bus or in other ways, Figure 9 Take connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More