

A guide wire/catheter operating device at the main end of a robot for vascular interventional surgery
An interventional surgery and robot-based technology, which is applied in the field of medical surgical robot design, can solve the problems of separate feedback of axial force and circumferential force, doctors spend a lot of time learning, and do not conform to doctors' operating habits, so as to avoid measurement errors and achieve great value. and application prospects, the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below with reference to the accompanying drawings and examples.
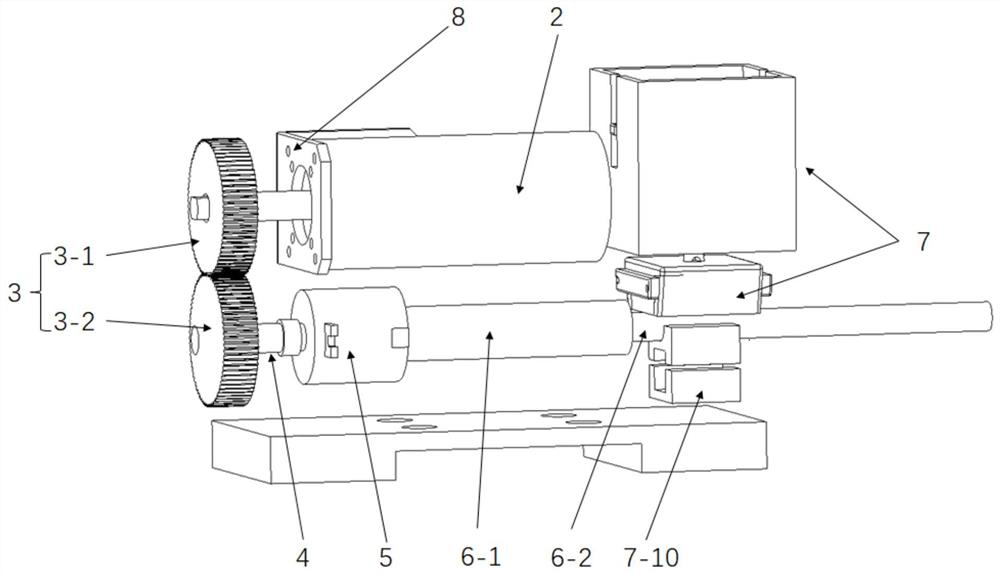
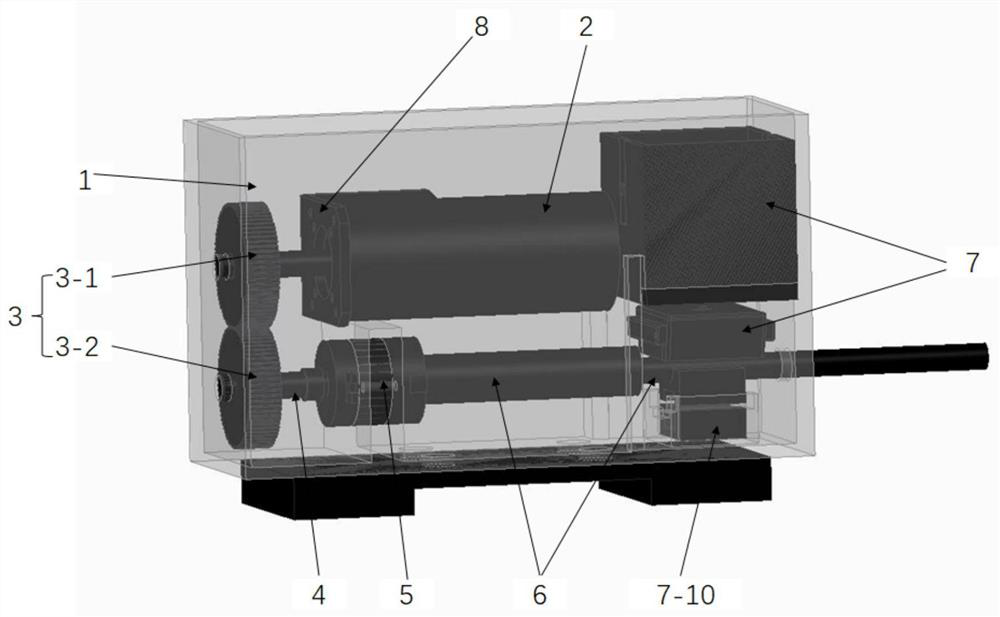
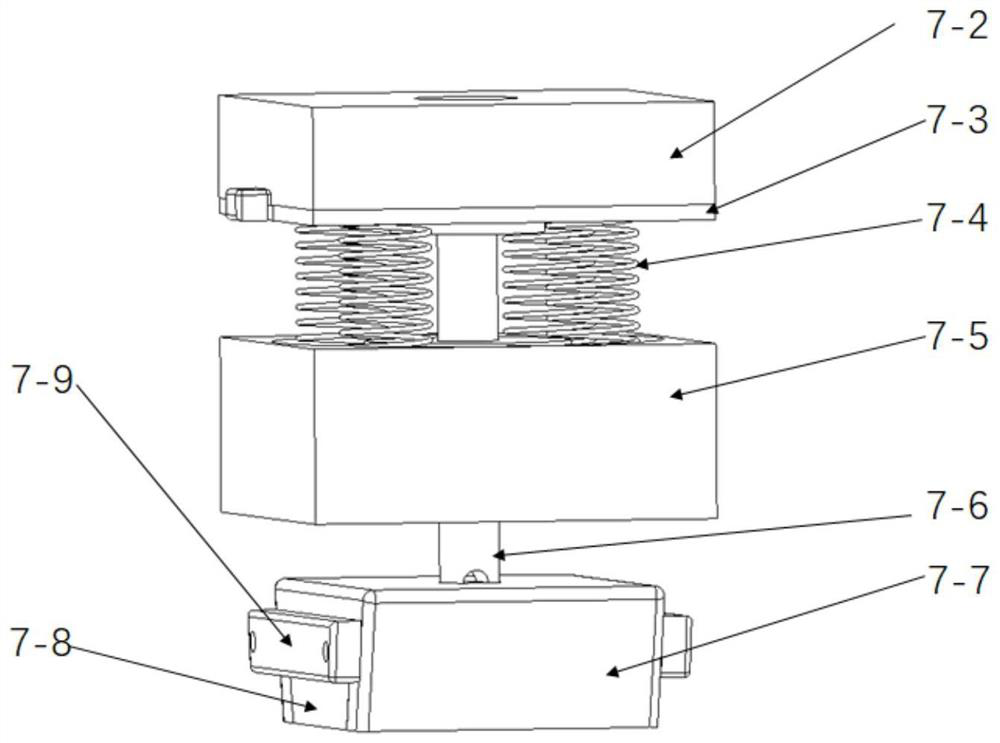
[0032] The present invention provides a guidewire / catheter operating device at the main end of a robot for vascular interventional surgery. The device integrates functions such as displacement measurement, axial and circumferential force feedback, and realizes the miniaturization and multi-function of the operating device at the main end of a robot for vascular interventional surgery. change. Among them, the optical sensor is used to measure the real-time displacement data (axial and circumferential movement displacement) of the master end operation, the brushless DC motor is used to realize the real-time circumferential force feedback of the master end operation, and the newly designed axial force feedback device can realize the master end operation. Real-time axial force feedback.
[0033] Such as figure 1 with figure 2 As shown, the device includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More