

A farm unmanned automatic field patrol method
A farm and farmland technology, applied in the field of field inspection, can solve the problems of not being able to pay attention to every position, limited manpower and energy, and high cost of field inspection, reducing subjective perception bias, controllable data quality error, and high spectral resolution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
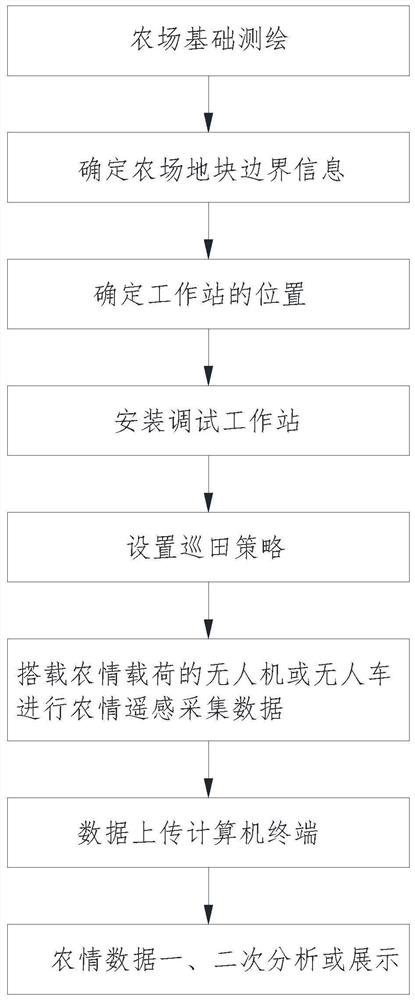
[0040] see figure 1 Shown, a kind of farm unmanned automatic field inspection method, described field inspection method comprises the steps:
[0041] Step 1, farm basic surveying and mapping, measure the topography of the farmland with surveying and mapping equipment on the farmland that needs to be inspected, and establish a topographic model of the farmland through the computer;
[0042]Step 2, determine the boundary information of farmland plots, carry out surveying and mapping of the peripheral shape and boundary of the farmland on the farmland by surveying and mapping equipment, combine the peripheral shape of the farmland and the size information of the boundary with the terrain model established in the step 1 through The computer builds the topography and terrain model of the farm;
[0043] Step 3, determine the position of the unmanned aerial vehicle hangar, select the position of the unmanned aerial vehicle hangar by the topography and terrain model set up in the sai...
Embodiment 2
[0061] Loading a large-area monitoring unit on an unmanned vehicle can also achieve agricultural data collection with the same completeness under non-destructive conditions.
Embodiment 3
[0063] Monitoring equipment using tethered methods, such as tethered drones or hydrogen balloons, can also achieve agricultural data collection with the same completeness under non-destructive conditions.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More