

Two-dimensional code positioning method and mobile robot positioning method based on two-dimensional code
A positioning method and two-dimensional code technology, which are applied in the fields of instruments, computer parts, electromagnetic radiation induction, etc., can solve the problems of affecting the recognition rate, increasing computing consumption, incomplete contour edge information, etc., to improve accuracy and speed. , to achieve precise positioning and reduce the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific implementation of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
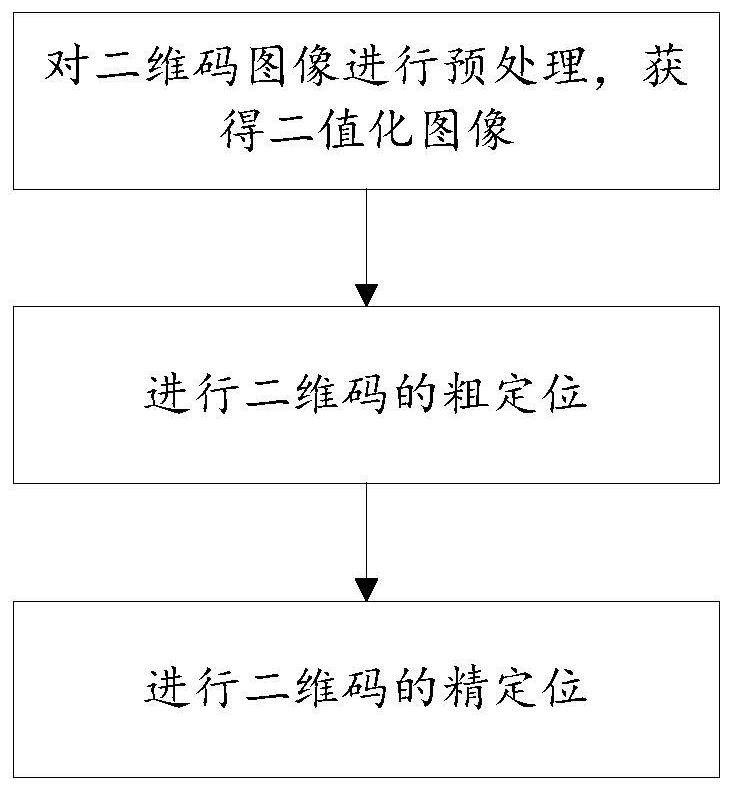
[0020] figure 1 The flow chart of the positioning method of the two-dimensional code provided by the embodiment of the present invention, the method specifically includes the following steps:
[0021] S11. Preprocessing the two-dimensional code image: the preprocessing sequentially includes grayscale, denoising, downsampling and binarization;
[0022] Grayscale processing: the QR code image collected by the camera is a color image in RGB format. The purpose of image grayscale is to obtain a grayscale image. The weighted average method is used to grayscale the image. The calculation formula is:
[0023] Y=0.3R+0.59G+0.11R
[0024]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More