

Bionic polarization synchronous localization and mapping method based on factor graph optimization
A technology of simultaneous positioning and factor mapping, applied in the directions of surveying and mapping, navigation, instrumentation, etc., can solve the problems of inaccurate positioning and composition, difficulty in determining one's own position, poor environmental adaptability, etc., to achieve high positioning and composition accuracy and improve the system. Robustness, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings. As a part of this description, the principle of the present invention will be described through implementation. Other aspects, features and advantages of the present invention will become clear through the detailed description.
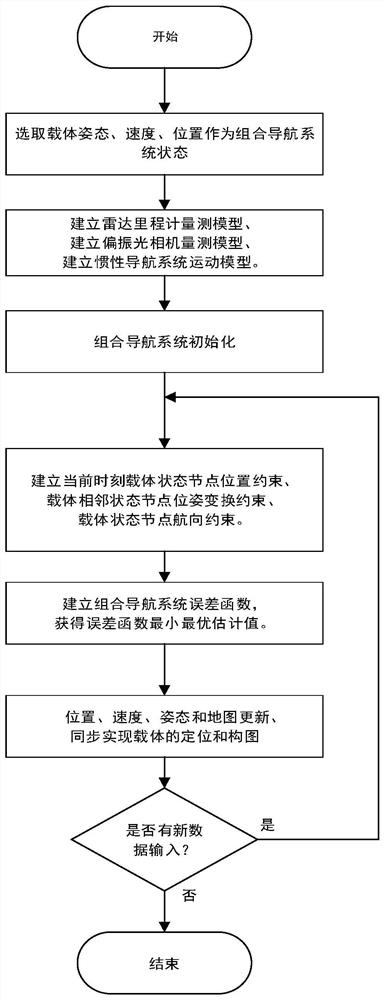
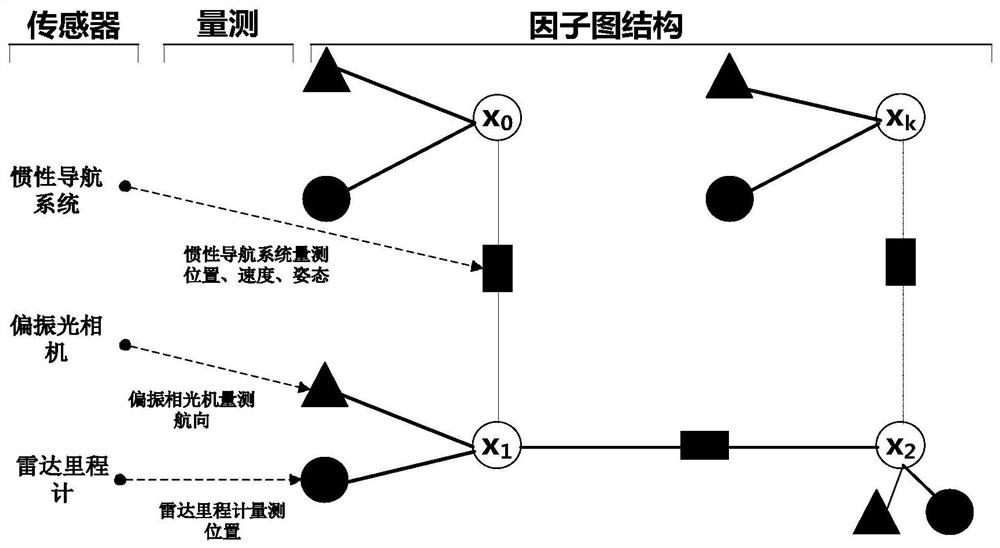
[0057] The invention relates to a bionic polarization SLAM method based on graph optimization, which selects the position, velocity, and attitude in the world coordinate system as the state vector, and establishes the state equation of the inertial navigation / polarization camera / radar odometer integrated navigation system; based on the output of the inertial navigation system Based on the position, velocity, and attitude information of the inertial navigation system, establish a motion model based on the inertial navigation system and build a motion model node for the inertial navigation system; output polarization azimuth information based on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More