

Wind power inspection robot
An inspection robot and wind power technology, which is applied in the monitoring of wind engines, machines/engines, and wind engines, etc., can solve the problems of poor battery life of inspection drones, inconvenient inspection of wind turbine blades, and general effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
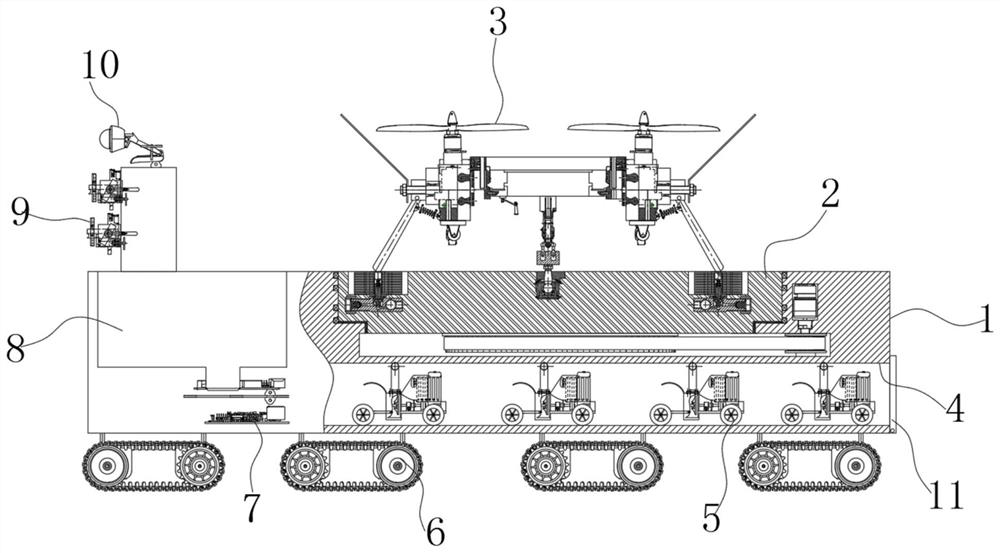
[0028] see Figure 1~4 , in an embodiment of the present invention, a wind power inspection robot, including
[0029] Inspection robot body 1,
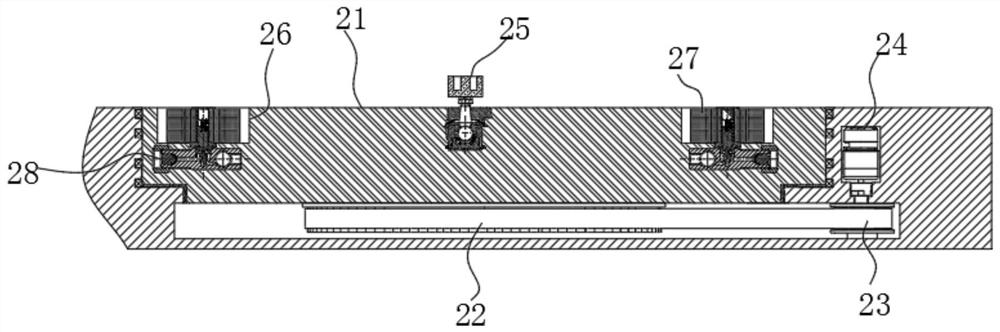
[0030] The alignment platform assembly 2 includes a rotating alignment platform 21 that can rotate along its central axis and is arranged on the inspection robot body 1,
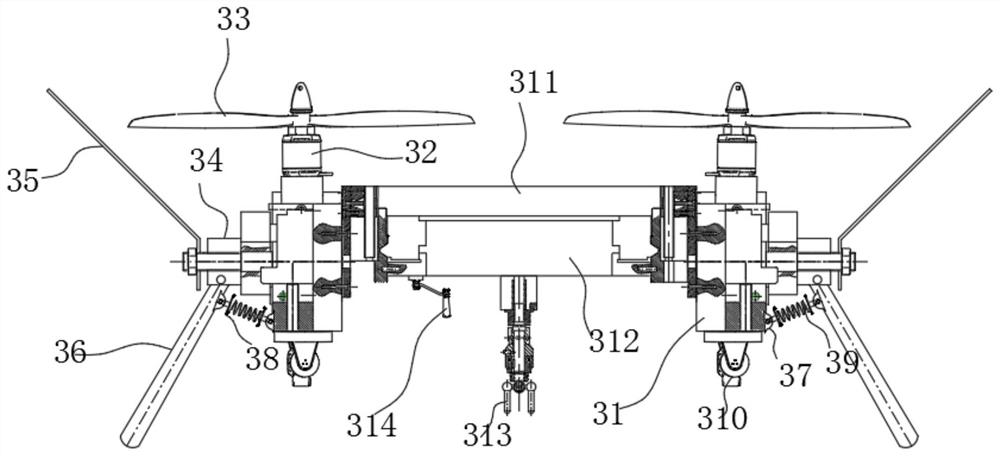
[0031] Inspection drone 3, which is placed on the rotating alignment platform 21; and
[0032] The inspection vehicle 5 is placed in the storage compartment 4 of the inspection robot body 1, and when the inspection robot body 1 arrives at the wind power detection position, the inspection drone 3 detects the wind power blades, and the inspection Car 5 detects the electrical equipment in the inner warehouse of the wind power installation column.
[0033] In this embodiment, the bottom of the inspection robot body 1 is provided with a plurality of walking crawlers 6, and the top of the inspection robot body 1 is provided with a laser sensor 9 and a probe 10 facing t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More