

AGV forklift truck autonomous positioning mobile SLAM navigation system
A navigation system and autonomous positioning technology, applied in the field of forklift navigation systems, can solve the problems of poor code scalability, high scene lighting requirements, sparse map point clouds, etc., to increase positioning accuracy and operation efficiency, reduce the impact of lighting changes, The effect of reducing positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
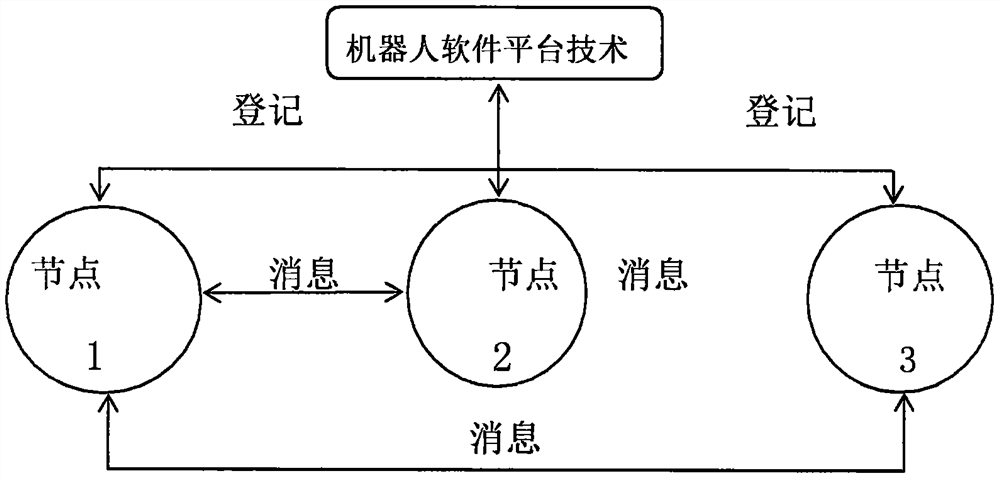
[0009] A kind of AGV forklift self-positioning mobile SLAM navigation system implementing the present invention, a kind of AGV forklift self-positioning mobile SLAM navigation system, includes real-time positioning and map construction, real-time positioning and map construction adopt three-thread structure, tracking thread, local optimization thread, The global closed-loop detection and optimization thread are carried out simultaneously. The AGV forklift adopts a non-reflector laser AGV forklift, and the non-reflector laser forklift AGV adopts a laser + SLAM navigation system.
[0010] A kind of AGV forklift self-positioning mobile SLAM navigation system implementing the present invention, real-time positioning and map construction adopt pinhole camera model, pinhole camera model adopts artificial beacon and robust beacon recognition algorithm, artificial beacon adopts visual SLAM algorithm Architecture and principles.
[0011] An AGV forklift self-positioning mobile SLAM nav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More