

Cross-type binocular camera calibration method based on automatic positioning
A binocular camera and calibration method technology, applied in image data processing, instruments, calculations, etc., can solve problems such as complex point cloud data processing and small field of view, achieve strong practicability, improve calibration accuracy, and realize automatic positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
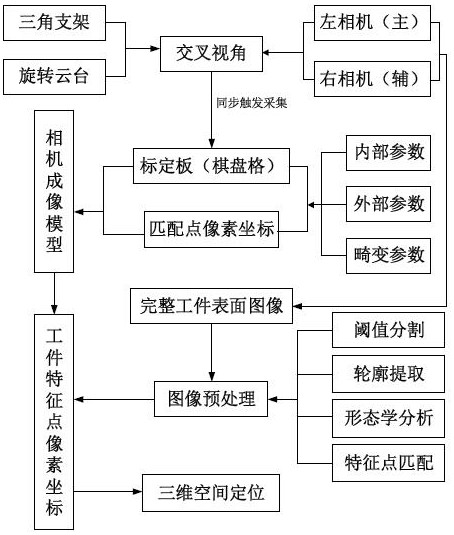
[0042] see figure 1 , a schematic flow chart of a cross-type binocular camera calibration method based on automatic positioning provided by an embodiment of the present invention, including the following steps:
[0043] Step 1. Select two CMOS cameras as binocular cameras. The two CMOS cameras are the left camera as the main camera and the right camera as the auxiliary camera. Fix the CMOS cameras to their respective rotating heads and tripods. The angle of the 360-degree rotating pan-tilt determines the cross-view angle between the two CMOS cameras, which effectively expands the imaging ran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More