

Joint torque determination method for four-footed wall-climbing robot with different postures
A technology for wall-climbing robots and determination methods, which is applied in attitude control, instruments, control/regulation systems, etc., and can solve the problems of large joint torque workload of quadruped wall-climbing robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] For ease of understanding, the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
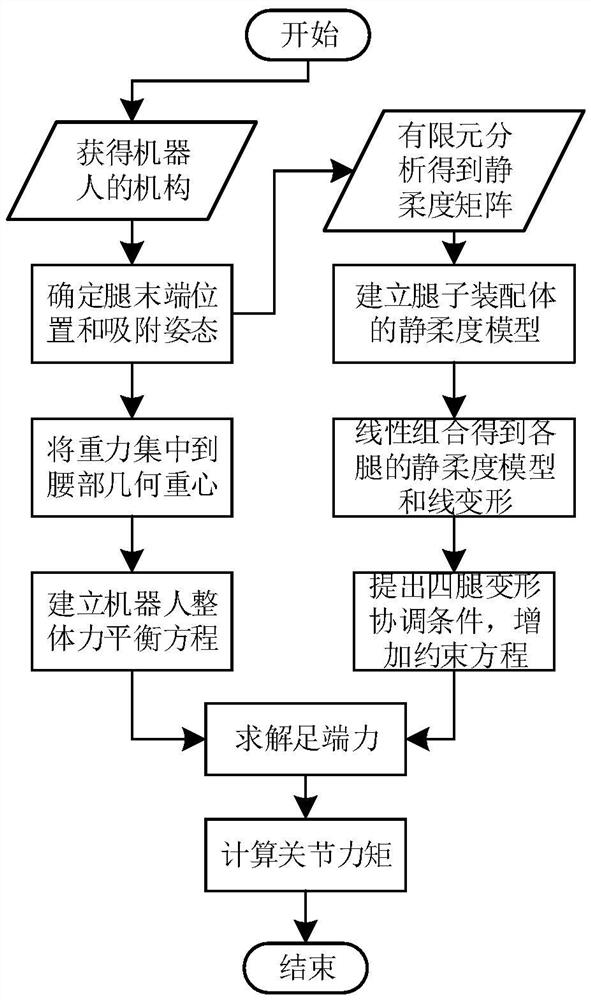
[0071] A method for determining joint torques of a quadruped wall-climbing robot with different postures provided in this embodiment includes the following steps:
[0072] Step 1: When the robot is attached to multiple legs, use the adsorption pose to describe the status information of the robot's adsorption, which includes the joint angle of the robot, the posture of the middle waist, and the state of whether each leg is attached.
[0073] Specifically, this step includes:
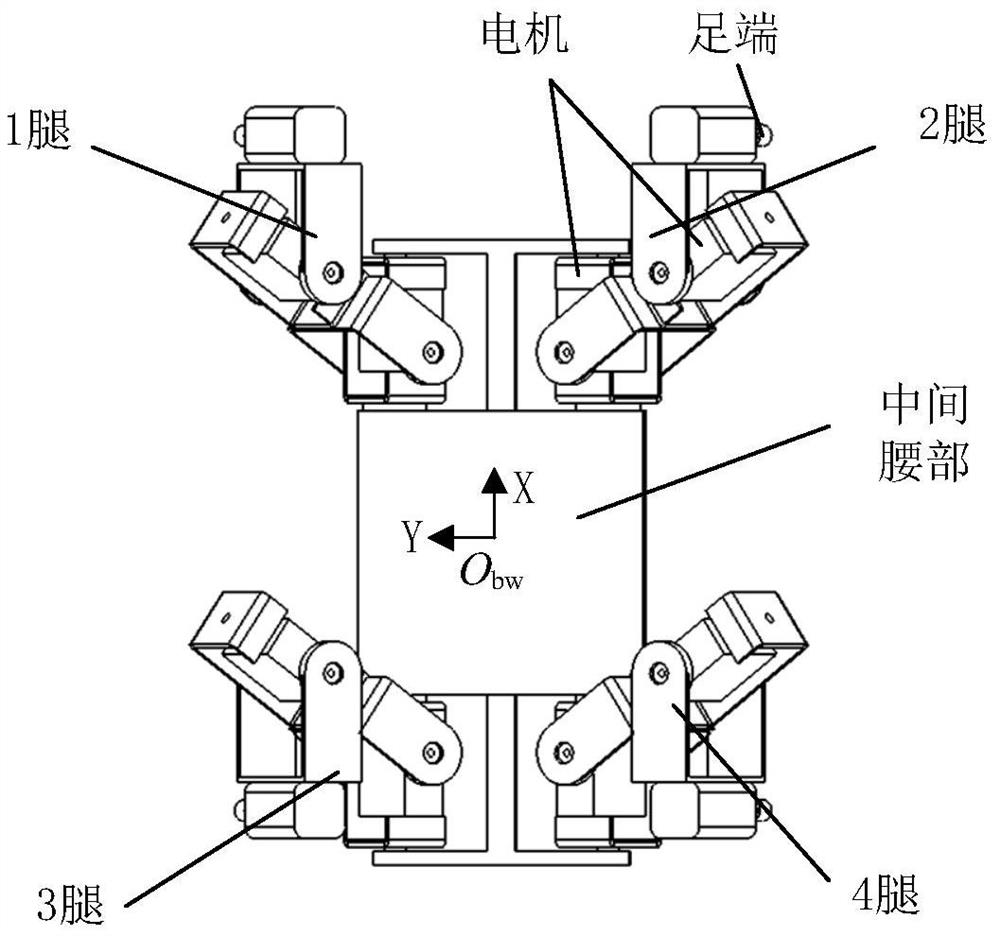
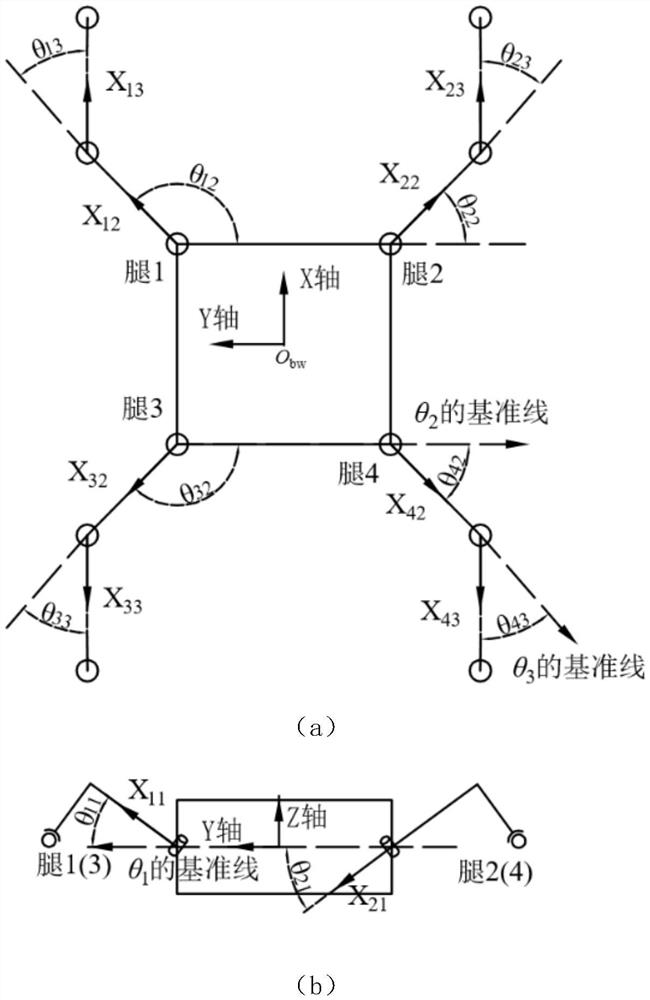
[0074] Step 1.1: Consider the robot structure as an intermediate waist D 1 D. 2 D. 3 D. 4 and four-legged A i B i C i D. i f i (i=1,2,3,4) form, where F i 、D i 、C i are the joints 1, 2, and 3 of the i-th leg of the robot, and establish the torso world coordinate system O with the center of the middle waist as the origin bw ;
[0075] Step 1....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More