

Three-rotor unmanned aerial vehicle robust tracking controller control method
A tracking controller and control method technology, applied in three-dimensional position/channel control, attitude control, non-electric variable control and other directions, can solve limitations, the problem of three-rotor UAV position and attitude tracking control is not mentioned in relevant literature, lacks Stability analysis and experimental verification, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
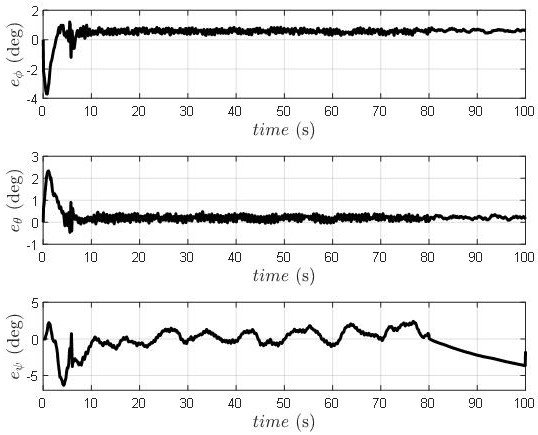
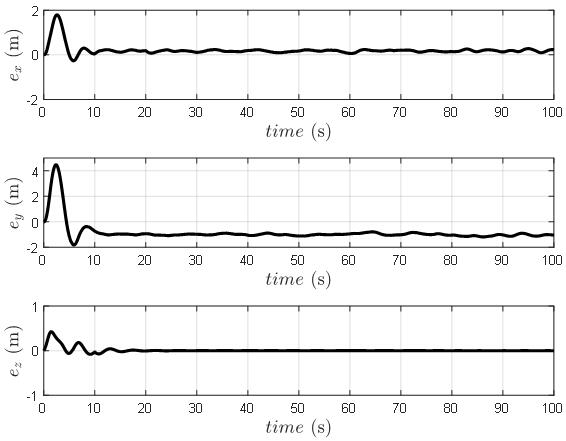
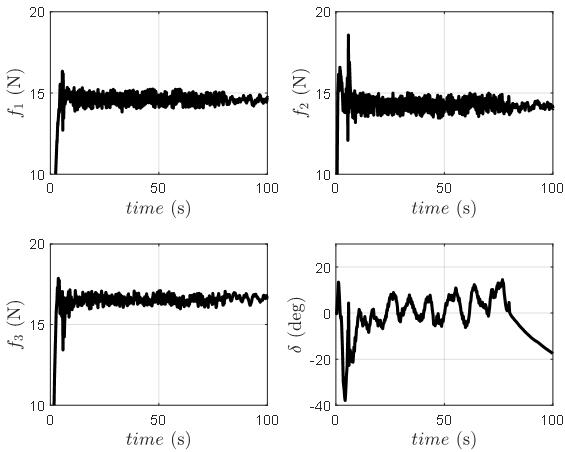
[0050] Such as Figure 1-4 As shown, the present embodiment provides a three-rotor UAV robust tracking controller control method, the steps include establishing a three-rotor UAV nonlinear dynamics model, determining the current motor total lift vector F, current position ξ, current attitude η, Target position ξ d , target pose η d ;The current position is obtained by the onboard sensor of the UAV, and the difference between the target position and the tracking error is obtained, and the position tracking control is realized according to the pre-designed virtual controller v; the target roll angle and target pitch angle are calculated by the virtual controller The specific expression of , the current attitude is obtained by the UAV record sensor, and the difference between the two is obtained to obtain the attitude tracking error. According to the pre-designed attitude controller u, the attitude tracking error is calculated and updated until the error approaches 0.
[0051] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More