

Adaptive dynamic surface control method based on RBF neural network compensation
A technology of dynamic surface control and neural network, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the stability of primary permanent magnet linear motor parameter time-varying control system, etc., to ensure robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. The specific embodiments described here are only used to explain the present invention, not to limit the invention.
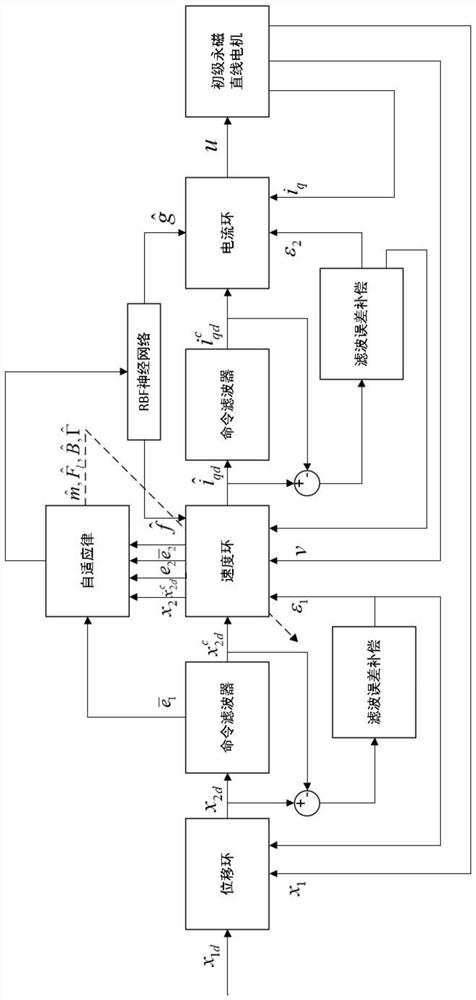
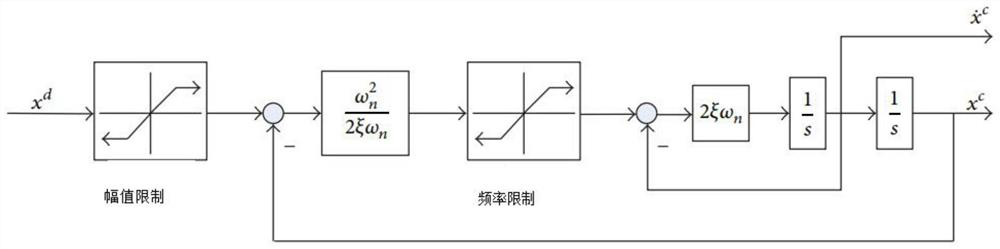
[0014] see Figure 1-Figure 2 , this embodiment specifically provides an adaptive dynamic surface control method based on RBF neural network compensation, and the specific steps of the control method are as follows.
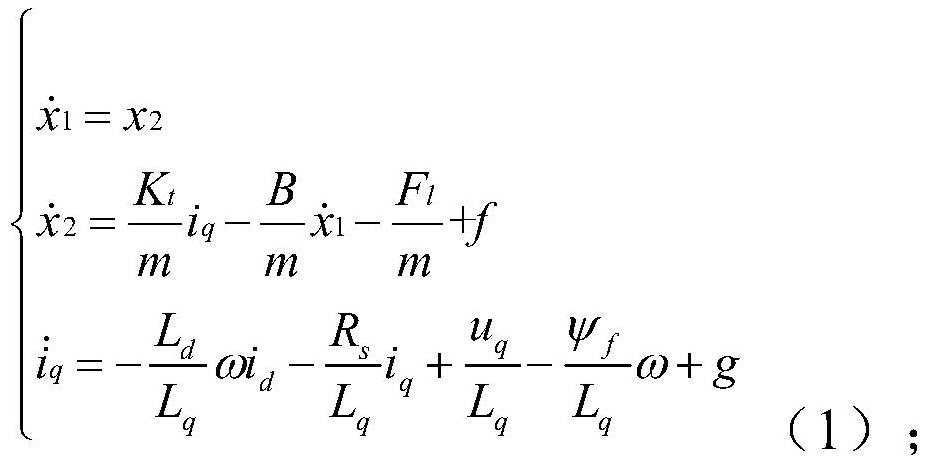
[0015] First, the primary permanent magnet linear motor three-phase winding current i a i b i c After Clark coordinate transformation and Park transformation, the current signal i in the two-phase rotating dq coordinate system is obtained d i q , combined with the displacement and velocity of the motor, the state space equation of the primary permanent magnet linear motor in the dq coordinate system is obtained.
[0016] The state space equ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More