

Mobile robot multistage obstacle avoidance system and method based on semantic laser
A technology for mobile robots and robot bodies, applied in control/adjustment systems, instruments, motor vehicles, etc., can solve the problems of inability to identify the type and characteristics of obstacles, reduced safety, and easy to cause safety problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
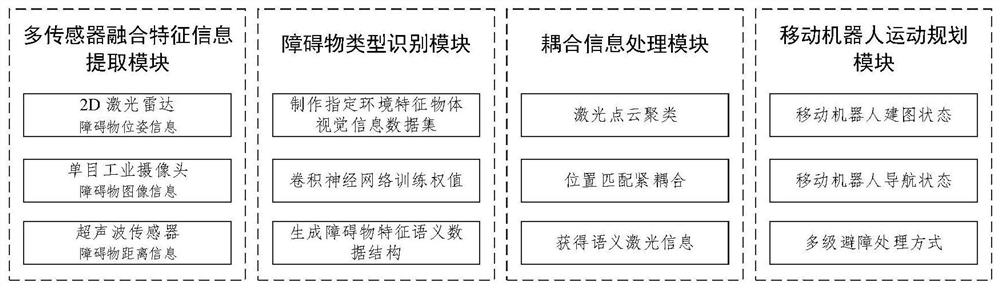
[0042] Such as figure 1 As shown, a semantic laser-based mobile robot multi-level obstacle avoidance system, the system includes multi-sensor fusion feature information extraction module, obstacle type recognition module, coupling information processing module and mobile robot motion planning module.
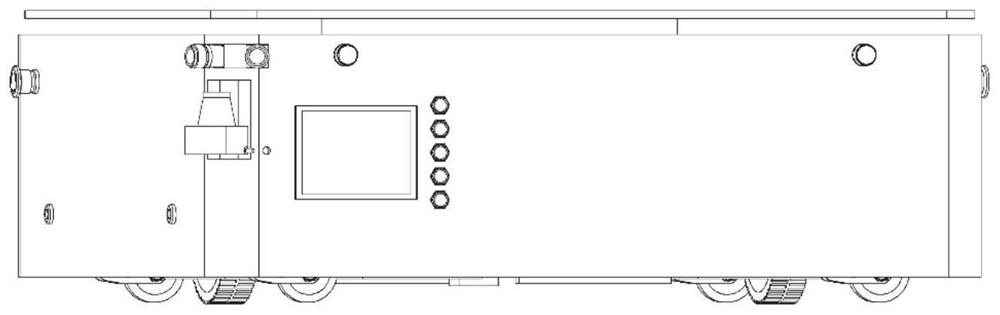
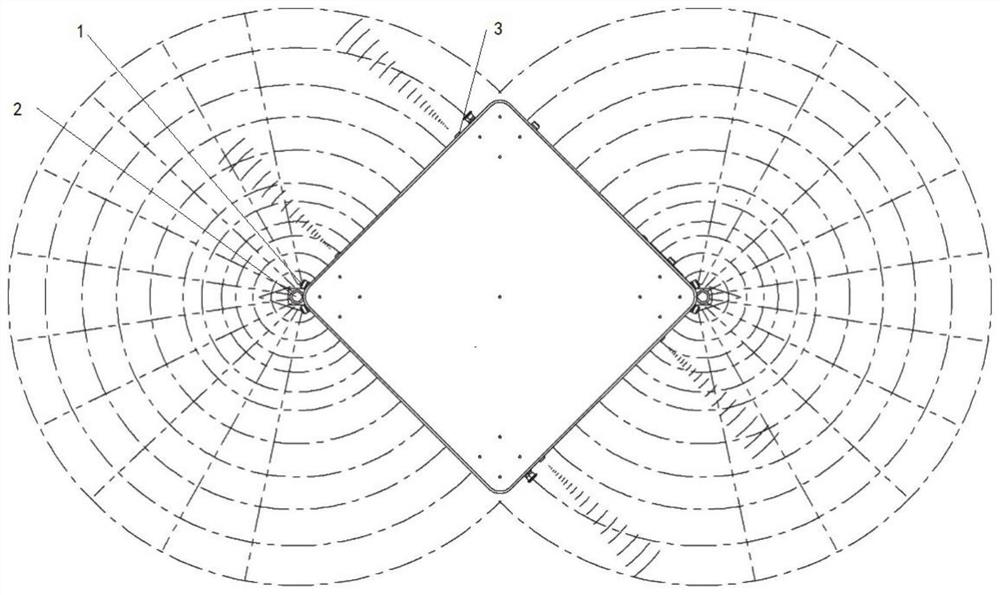
[0043] Such as Figure 2-3 As shown, this embodiment is combined with an autonomous guided vehicle (AGV). In the AGV, the multi-sensor fusion feature information extraction module of this embodiment includes two 2D laser radars, four monocular industrial cameras, and four ultrasonic sensor, figure 2 It shows the installation position of the components in the whole module.
[0044] Among them, the 2D lidar scans the obstacle information within 270° of the center of the circle where the radar is installed at high frequency, and returns the obstacle angle and distance point cloud coordinates based on its own coordinate system. The maximum distance of the obstacle is 5m.
[0045...
Embodiment 2
[0059] A multi-level obstacle avoidance method for a mobile robot based on semantic laser, which also combines this embodiment with an autonomous guided vehicle (AGV), as shown in Figure 6 As shown, it is the general flow chart of AGV 4 modules working together for multi-level obstacle avoidance. Figure 7 , 8 , 9, and 10 are its sub-processes, and the overall process includes the following steps:
[0060] According to the information obtained by the lidar on the robot body and the industrial camera, after coupling, the robot body can recognize the characteristic information of obstacles;
[0061] Divide the sector scanning range of the laser radar into three layers according to the distance between the obstacle and the robot body. The layer closest to the robot body is the dangerous range, the farthest layer is the safe range, and the rest is the deceleration range;
[0062] Determine whether the robot body is in the mapping state, and generate different obstacle avoidance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More