

Approaching contact method of rigid-flexible variable mechanism to space target
A space target and variable technology, applied in the direction of non-electric variable control, instrument, attitude control, etc., can solve the problems of clearing mission failure, increased risk of parent star and debris collision, complex dynamic characteristics, etc., and achieve high speed, Real-time strong, wide-ranging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to better illustrate the purpose and advantages of the present invention, the specific implementation and effects of the present invention will be further described in detail below in conjunction with examples and accompanying drawings.
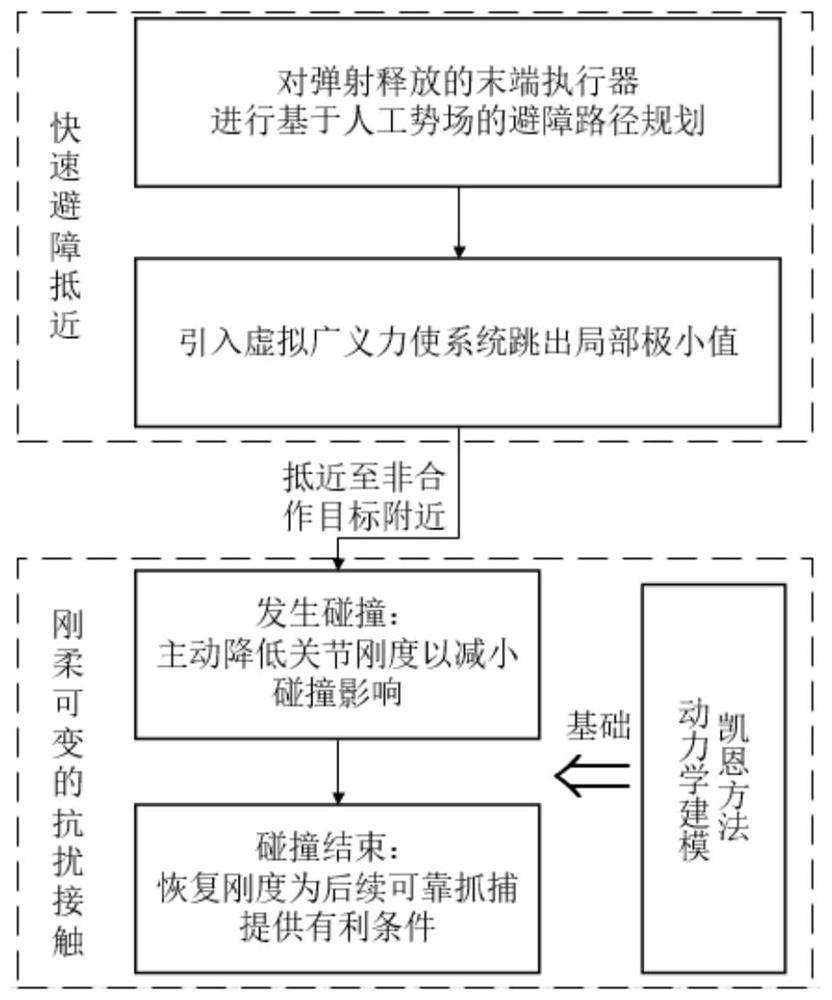
[0064] This embodiment discloses a method for approaching and contacting space debris by a rigid-flexible variable mechanism. The specific implementation steps are as follows:
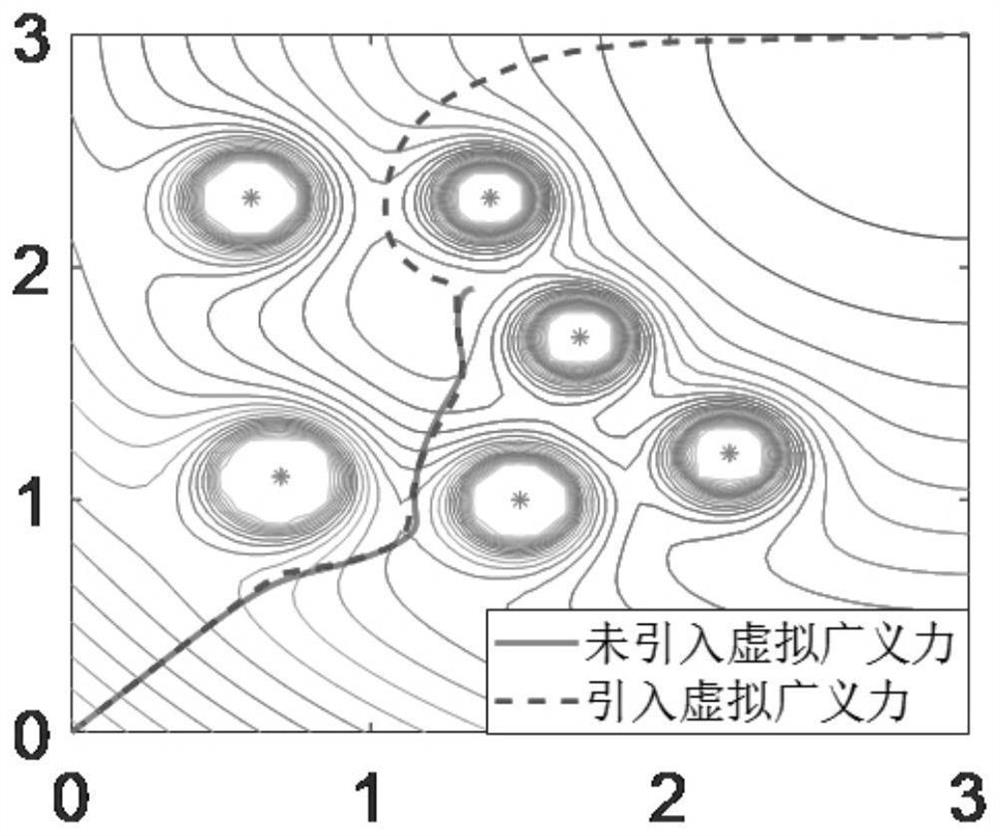
[0065] Step 1: Carry out kinematic trajectory planning for the rigid-flexible variable mechanism based on the artificial potential field method, and introduce virtual generalized force so that the rigid-flexible variable mechanism has the ability to jump out of the local minimum;
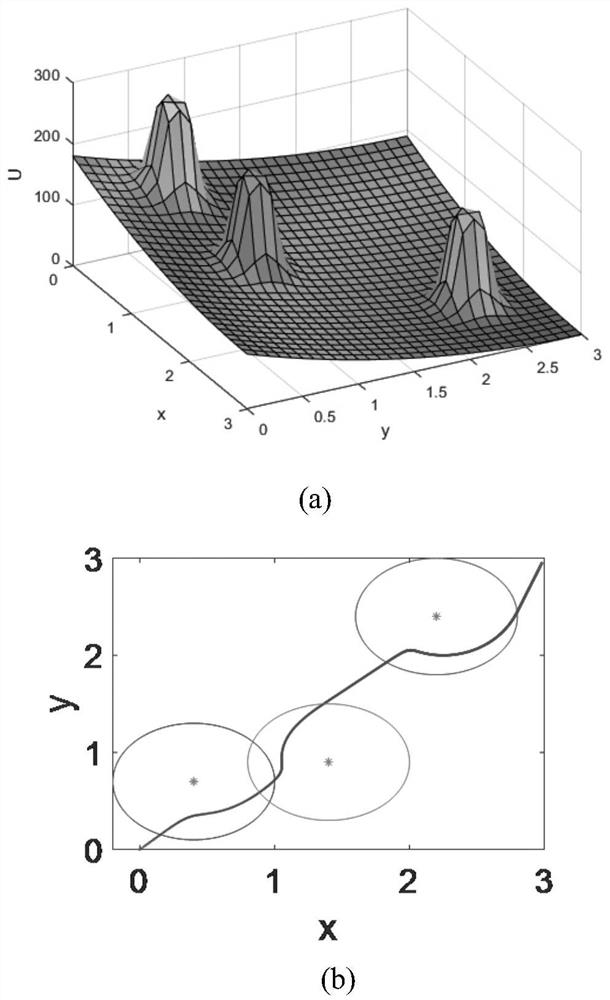
[0066] Consider the path planning problem where the end effector released by ejection starts from the starting point (0, 0) and needs to reach the target point (3, 3), where there are three intermediate obstacle points between the starting point and the target point, and thei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More