

Sensorless collision detection method and system for six-axis industrial robot
An industrial robot, collision detection technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem of low collision detection accuracy, and achieve the effect of improving collision detection accuracy, shortening delay time, and reducing difference error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
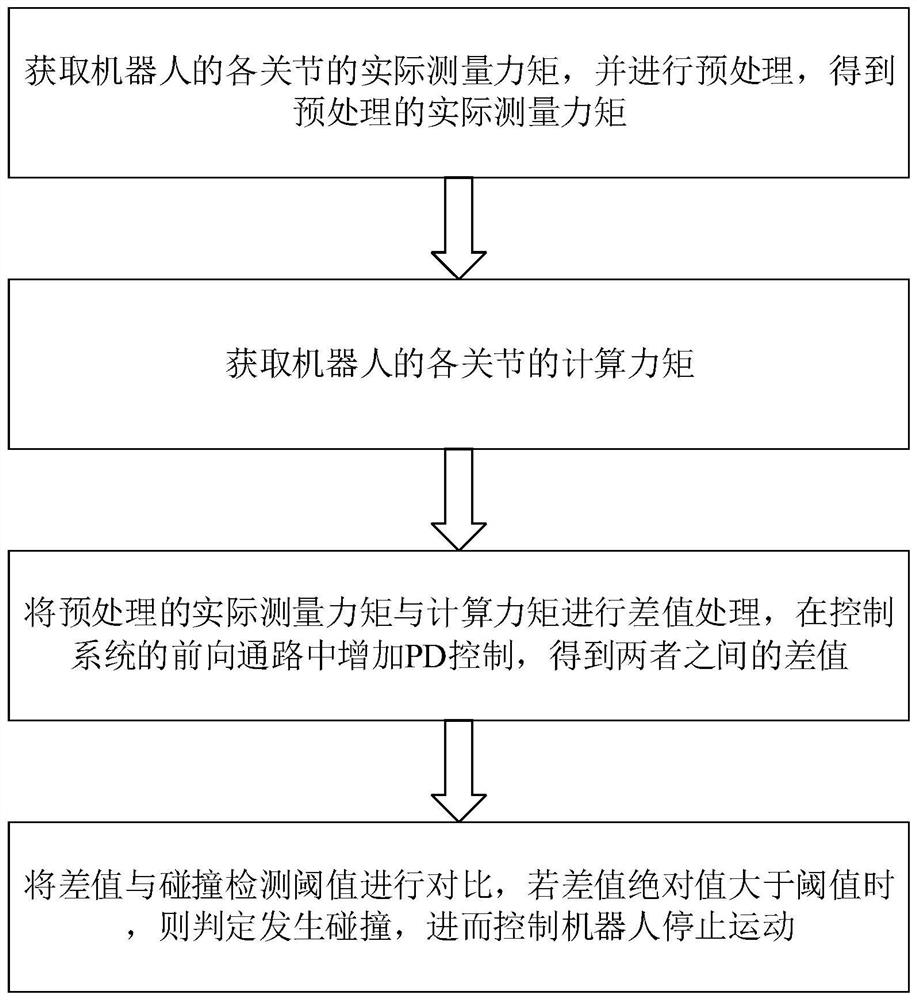
[0044] A sensorless collision detection method for a six-axis industrial robot, such as figure 1 shown, including the following steps:
[0045] Obtain the actual measured torque of each joint of the robot, and perform preprocessing to obtain the preprocessed actual measured torque;
[0046] Obtain the calculated torque of each joint of the robot;
[0047] The difference between the pre-processed actual measured torque and the calculated torque is processed, and PD control is added in the forward path of the control system to obtain the difference between the two;
[0048] Compare the difference with the collision detection threshold. If the absolute value of the difference is greater than the threshold, it is determined that a collision has occurred, and then the robot is controlled to stop moving.
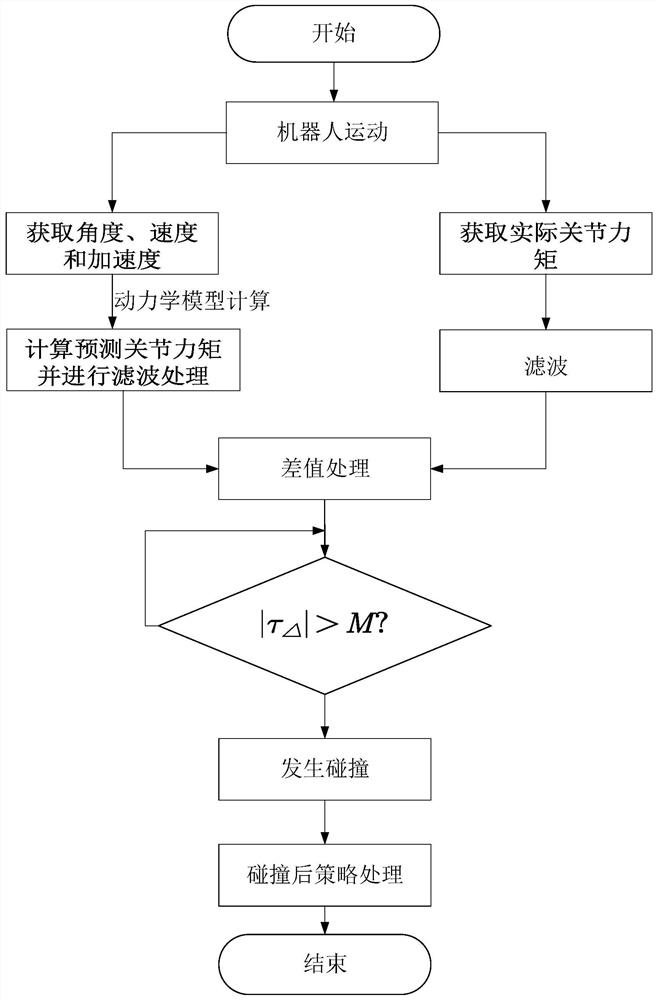
[0049] Since there is a time delay between the joint torque calculated by the actual measurement current and the joint torque calculated by the dynamic model, there is a differe...
Embodiment 2
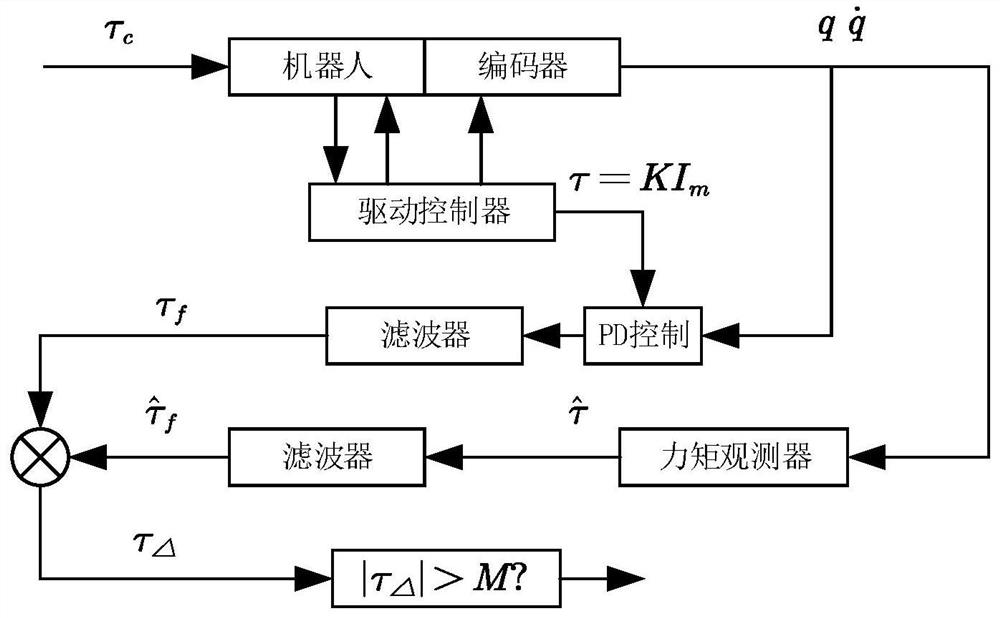
[0062] A sensorless collision detection system for a six-axis industrial robot, such as Figure 4 shown, including:
[0063] The control system is used to receive data information, and then issue control instructions for control operations;
[0064] The robot is used to receive motion commands and stop motion commands to realize the motion and stop motion of the robot;
[0065] The actual measurement torque module is used to measure the actual measurement torque of the robot;
[0066] Calculation moment module, used to obtain calculation moment through six-axis industrial robot dynamic model and moment observer;
[0067] The difference calculation module is used for calculating the difference between the actual measured torque and the calculated torque;
[0068] The threshold comparison module is used to compare the difference with the collision detection threshold, obtain the comparison result, and send it to the control module.
[0069] Further, it also includes a PD con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More