

Cooperative control method for underwater glider formation
An underwater glider and cooperative control technology, applied in non-electric variable control, height or depth control, control/adjustment system, etc., can solve the problem of low detection efficiency of underwater glider, reduced formation operation safety, and unfavorable formation operation of underwater glider and other issues, to achieve the effect of improving the utilization rate of computing resources, saving computing resources, and high security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
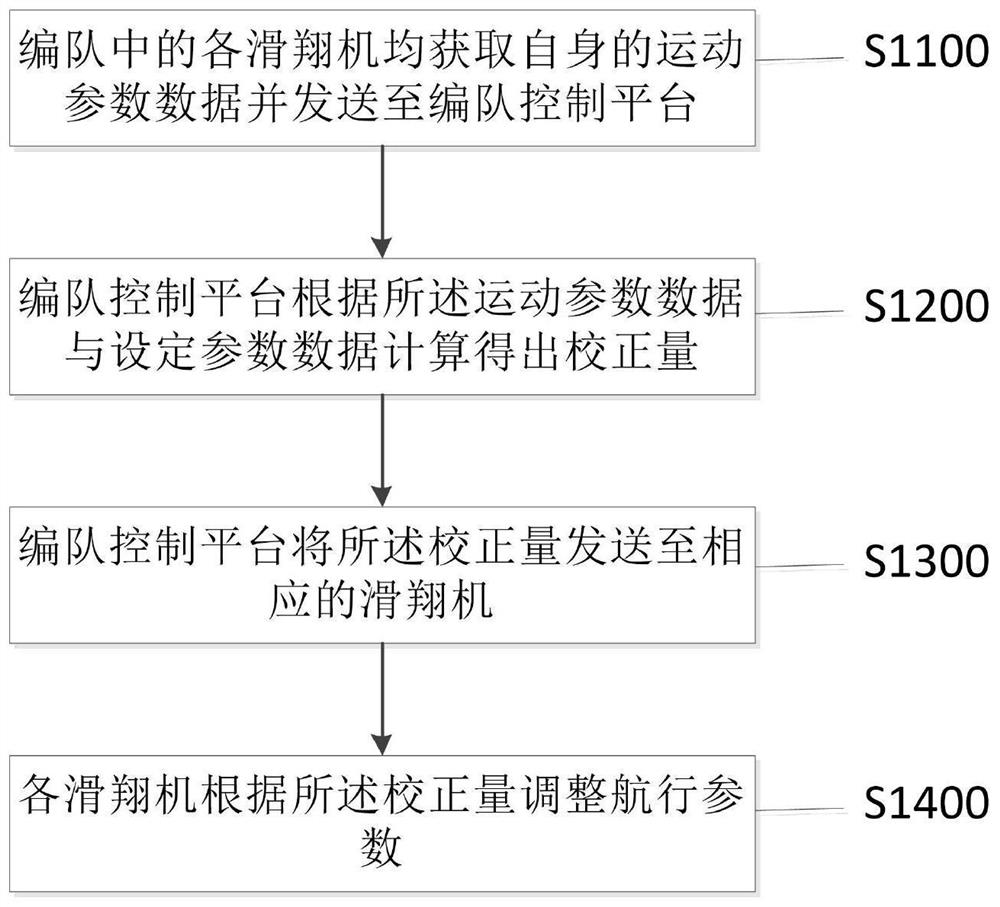
[0042] like figure 1 As shown, the cooperative control method of the underwater glider formation in the present embodiment includes the following steps:
[0043] S1100: Each underwater glider in the formation obtains its own motion parameter data and sends it to the formation control platform;
[0044] In this step, the motion parameter data includes position information data and navigation speed data. After the position information of the underwater glider is determined, the motion parameter data also includes at least the navigation direction data and heading angular acceleration data of the underwater glider. The data and the navigation speed data can determine the specific position of the underwater glider in the next control cycle, so that the correction amount of the corresponding underwater glider can be calculated.
[0045] Not only the formation control platform can know the position of the underwater gliders in the formation, but also the position information betwee...
Embodiment 2
[0064] In a specific example, each member of the formation first obtains its own latitude and longitude data, roll angle, pitch angle, yaw angle and other data according to the pose sensor of its own platform; obtains mutual position information through communication between platforms , heading information, depth information and other data.
[0065] The formation control platform calculates and obtains the set parameter data according to its own motion parameters and the position of each member of the underwater glider formation in the formation. The formation control platform calculates its own latitude and longitude coordinates according to satellite positioning, and obtains the position coordinates of other members of the formation in the formation of this coordinate according to the coordinates, and the position coordinates are the set position data. It is convenient for the formation control platform to calculate the formation position of each member of the underwater gli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More