

Indoor scene three-dimensional point cloud reconstruction method and system based on depth information fusion
A 3D point cloud and indoor scene technology, applied in the field of 3D point cloud reconstruction of indoor scenes, can solve problems such as not considering the pixel depth value, achieve the effect of improving accuracy, enhancing robustness, and controlling the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
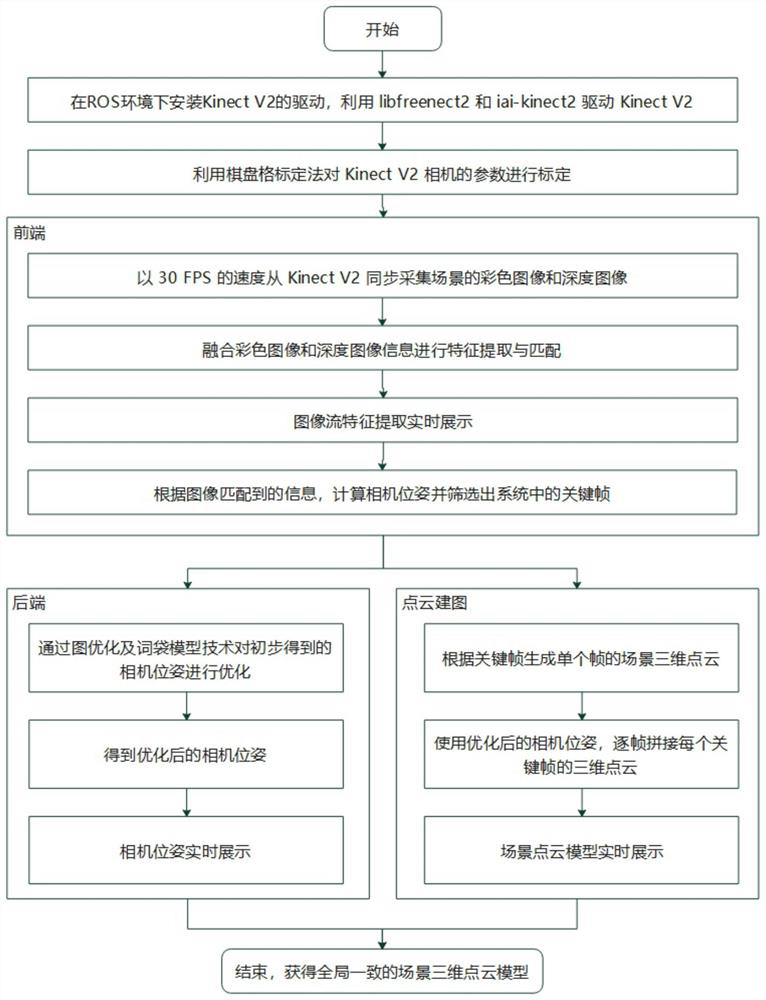
[0055] see figure 1 , an embodiment of the present invention provides a method for reconstructing a 3D point cloud of an indoor scene based on depth information fusion, the method specifically includes:
[0056] Step 1: The user installs the driver of KinectV2 in the ROS environment, and uses libfreenect2 and iai-kinect2 to drive KinectV2 to ensure the normal operation of the device.
[0057] Step 2: Use the checkerboard calibration method to calibrate the para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More