

Fast progressive optimal mechanical arm obstacle avoidance path planning method
A technology of path planning and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in balancing rapidity and optimality, and achieve the effect of avoiding overall time efficiency and avoiding path shrinkage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
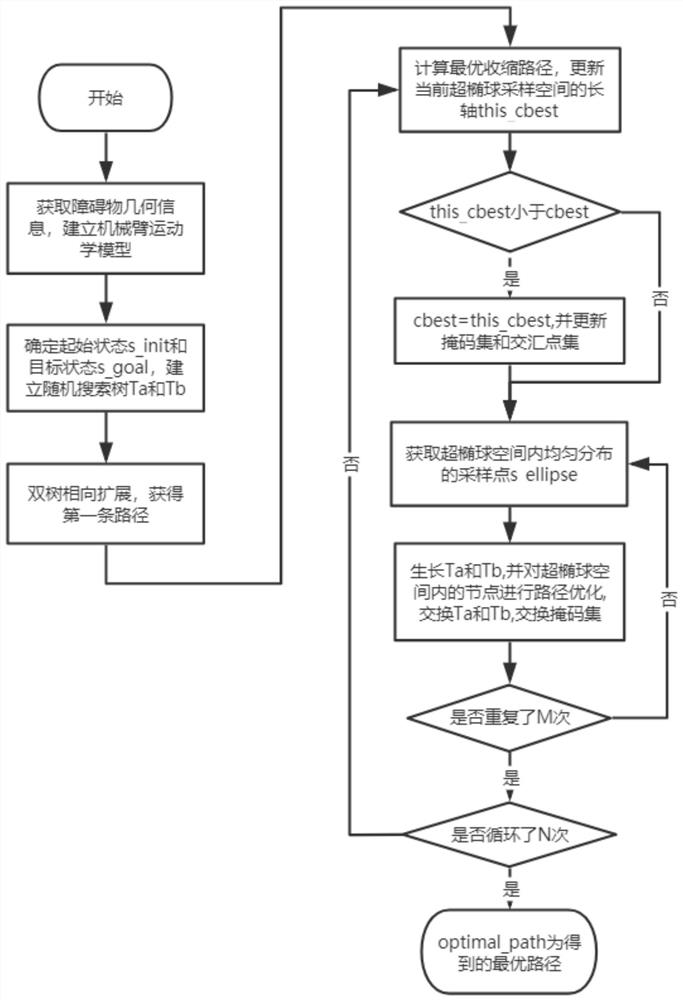
[0058] First, use the open source robot operating system ROS to build a simulation platform for a seven-degree-of-freedom manipulator; use the depth camera to scan to obtain obstacle information in the workspace, and use the AABB bounding box to simplify the environmental information to obtain the size and position information of all obstacles.
[0059] Determine the initial state s_init and the target state s_goal, and in the form of joint space (q 1 ,q 2 ,...,q n ) represents, n represents the degree of freedom of the mechanical arm, n=7 in this example. If it is expressed in the form of Cartesian space, a set of joint angles without collision can be obtained by connecting the inverse kinematics of the manipulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More