

A coding plane target used for camera internal and external parameter calibration and its coding method
A technology of planar targets and internal and external parameters, applied in image data processing, image analysis, instruments, etc., can solve the problems of incomplete target images, lack of flexibility, difficult to move, etc., to achieve improved flexibility, flexible coding methods, and intelligent calibration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0177] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, and the protection scope of the present invention can be more clearly defined.
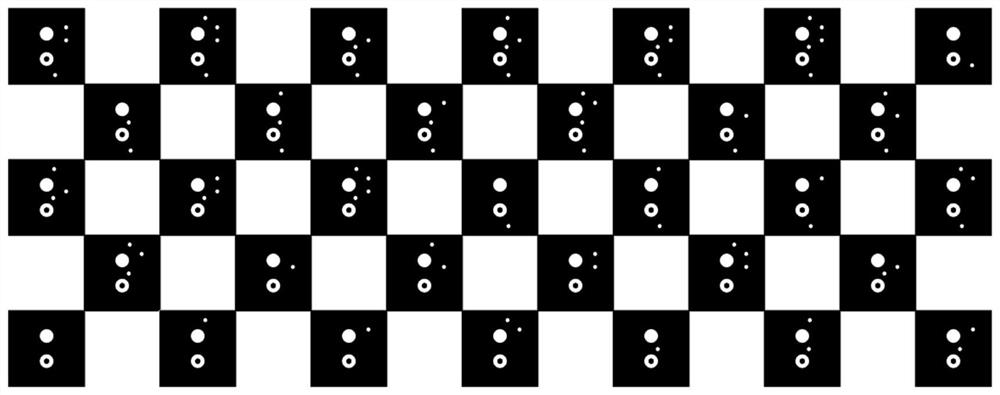
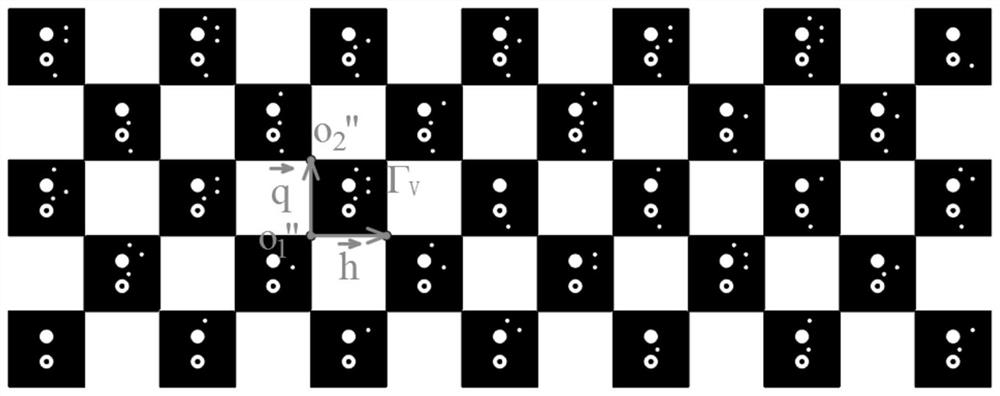
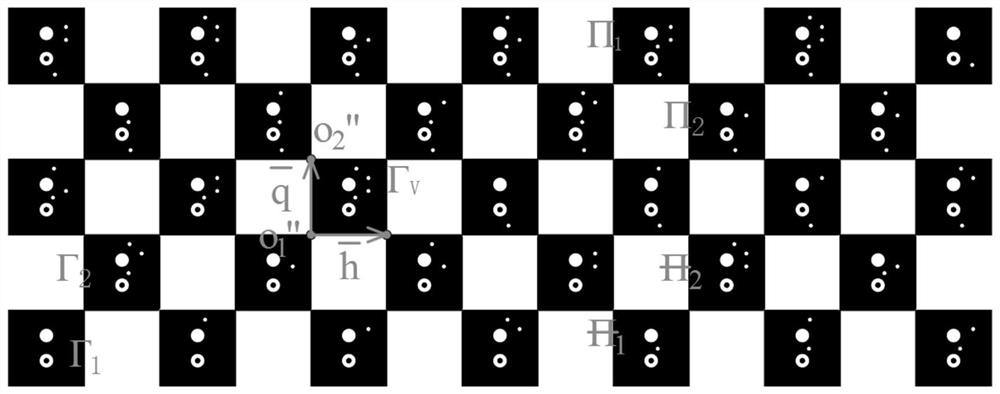
[0178] see figure 1 , a coding plane target for the calibration of internal and external parameters of the camera, the coding plane target is composed of a coding checkerboard composed of parallelogram coding units and parallelogram non-coding units alternately, and the coding plane target is connected with any diagonal parallel The intersection of the quadrilateral coding units serves as the calibration corner point of the coding plane target, and the coding plane target includes a total of M rows×N columns of calibration corner points, where M and N are both positive integers. In this embodiment, the encoded plane target includes a total of 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More