

Combined positioning method of inspection robot
A patrol robot and combined positioning technology, applied in the field of patrol robots, can solve the problem of high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
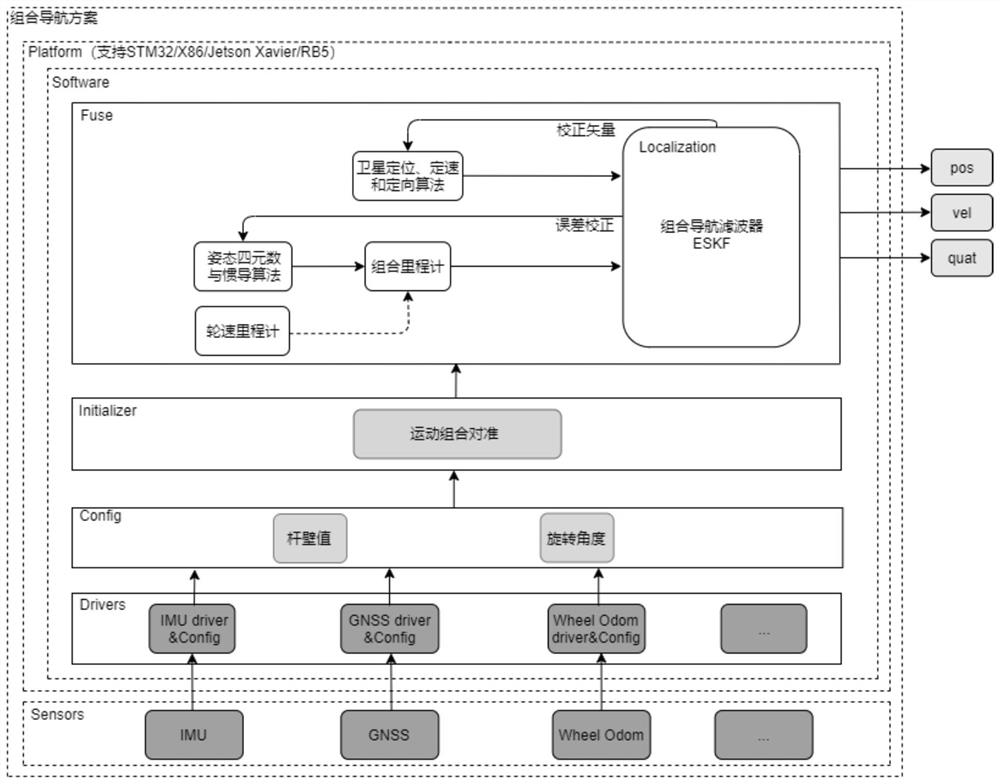
[0062] figure 1 It is a design diagram of the combined positioning software and hardware architecture of the inspection robot of the present invention. Such as figure 1 As shown, the combined positioning method of the substation inspection robot of the present invention comprises the following steps:
[0063] Step 1. Install inertial sensors and RAC sensors on the inspection robot, install a wheel speedometer on the chassis of the inspection robot, set an RTK mobile station on the inspection robot, and configure an RTK base station to communicate with the RTK mobile station through frequency modulation signals , complete RTK differential positioning through RTK mobile station;
[0064] Among them, the inertial sensor is a mature inertial sensor that has completed the calibration and temperature compensation of the turntable on the market; an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More