

High-frequency motion error compensation algorithm of small unmanned aerial vehicle BiSAR system
A technology of motion error and algorithm, applied in the field of bistatic synthetic aperture radar, can solve the problems of high-frequency error of trajectory, high-frequency motion cannot be recorded, and complex error influence, etc., to achieve a good focusing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and examples, so as to fully understand and implement the process of how to apply technical means to solve technical problems and achieve corresponding technical effects in the present invention. The embodiments of the present application and the various features in the embodiments can be combined with each other under the premise of no conflict, and the formed technical solutions are all within the protection scope of the present invention.
[0032] Additionally, the steps shown in the flowcharts of the figures may be implemented in a computer, such as a set of computer-executable instructions. Also, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
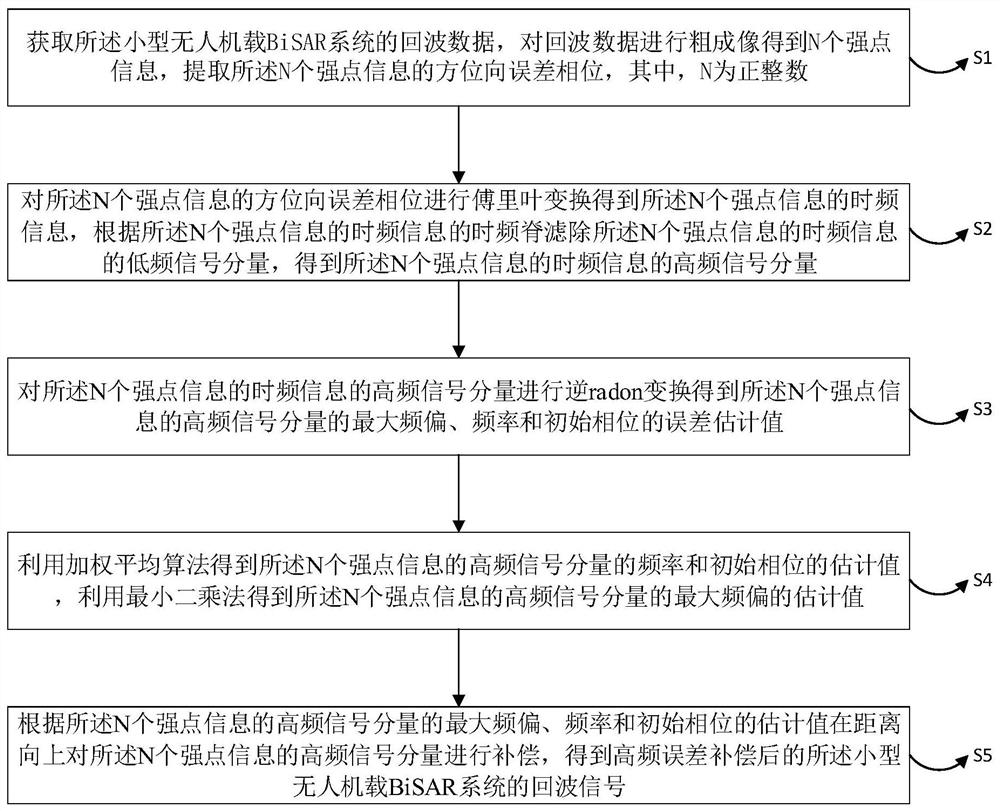
[0033] figure 1 A flow chart of a high-frequency motion error compensation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More