

Reconnaissance and attack integrated underwater unmanned underwater vehicle
A technology for submersibles and underwater robots, which is applied to underwater ships, underwater operating equipment, and ship weapons. It can solve problems such as the inability to guarantee the stability of the launching mechanism, the need to improve the strike accuracy, and the single assembly, so as to achieve both speed and speed. It can improve the combat capability of the army and the level of high-tech militarization, and reduce the effect of vibration and noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
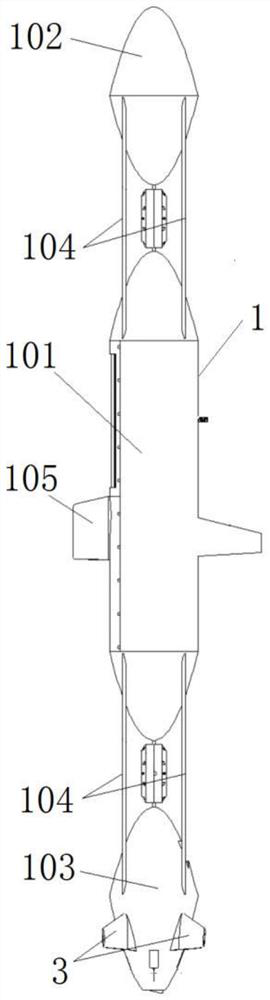
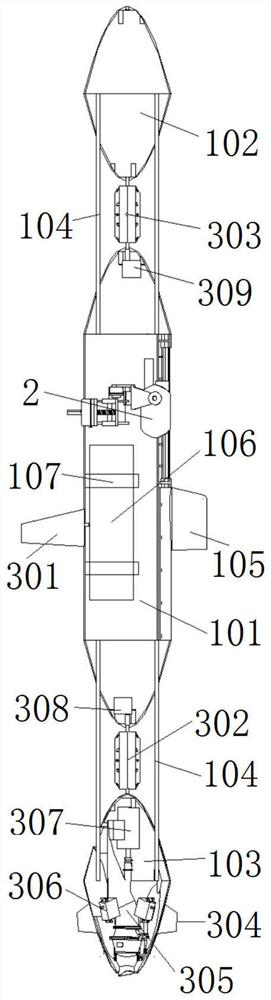
[0023] Such as Figure 1~4 , the integrated underwater unmanned submersible for inspection and strike is composed of a land control system and an underwater integrated system. It communicates with the onshore control system through an umbilical cable connection and monitors the real-time transmission of numerical control. The adaptive tracking launch mechanism 2 has a tracking shooting mode, which can accurately strike the target. The gimbal on each axis can be controlled in a closed loop to produce a movement that counteracts shaking, so as to achieve an adaptive effect. The pushing device 3 is responsible for promoting the movement of the main mechanism 1 of the underwater robot, and can generate thrusts in various directions to enable the underwater robot to complete motions such as heaving, advancing and retreating, bow turning, lateral movement, rolling, and slewing, and improve the performance of the underwater robot. Systematic flexibility of movement.
[0024] The in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More