

Multi-machine cooperative trajectory optimization method based on quintic non-uniform rational B-spline
A non-uniform and rational trajectory optimization technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of unstable joint motion of robots, end motions that cannot meet high-precision coordinated motion, etc., and achieve good convergence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention is described in further detail now in conjunction with accompanying drawing.
[0058] It should be noted that terms such as "upper", "lower", "left", "right", "front", and "rear" quoted in the invention are only for clarity of description, not for Limiting the practicable scope of the present invention, and the change or adjustment of the relative relationship shall also be regarded as the practicable scope of the present invention without substantive changes in the technical content.
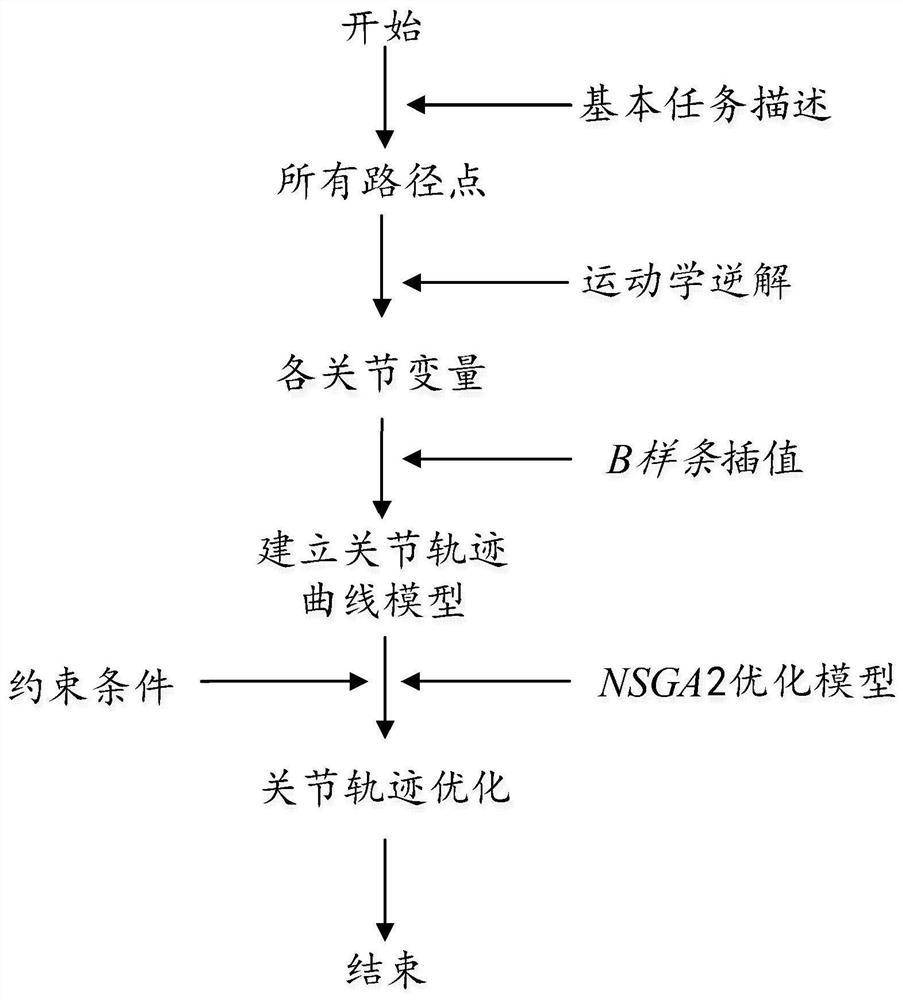
[0059] The embodiment of the present invention provides a multi-machine collaborative trajectory optimization method based on non-uniform rational B-splines of degree 5, such as figure 1 As shown, the robot trajectory planning flow chart of the present invention completes the basic implementation process of the invention, transforms each motion path point into a corresponding joint path point using robot kinematics inverse solution, and then utilizes five non-unifor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More