

A sliding mode control method for podded propulsion motor based on compact dynamic linearization
A propulsion motor and linearization technology, applied in the field of pod propulsion motor sliding mode control scheme, can solve the problems of unmodeled dynamics, the influence of disturbance, and the inability to establish accurate models, etc., to improve dynamic performance and steady-state performance, reduce The effect of small system chattering and torque pulse reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] As mentioned above, the podded propulsion motor of the semi-submersible ship is easily affected by unknown factors such as waves and sea wind when it works at sea. Influence, the present invention designs a sliding mode control scheme of pod propulsion motor based on compact dynamic linearization. The present invention will be described in more detail below with reference to the accompanying drawings.
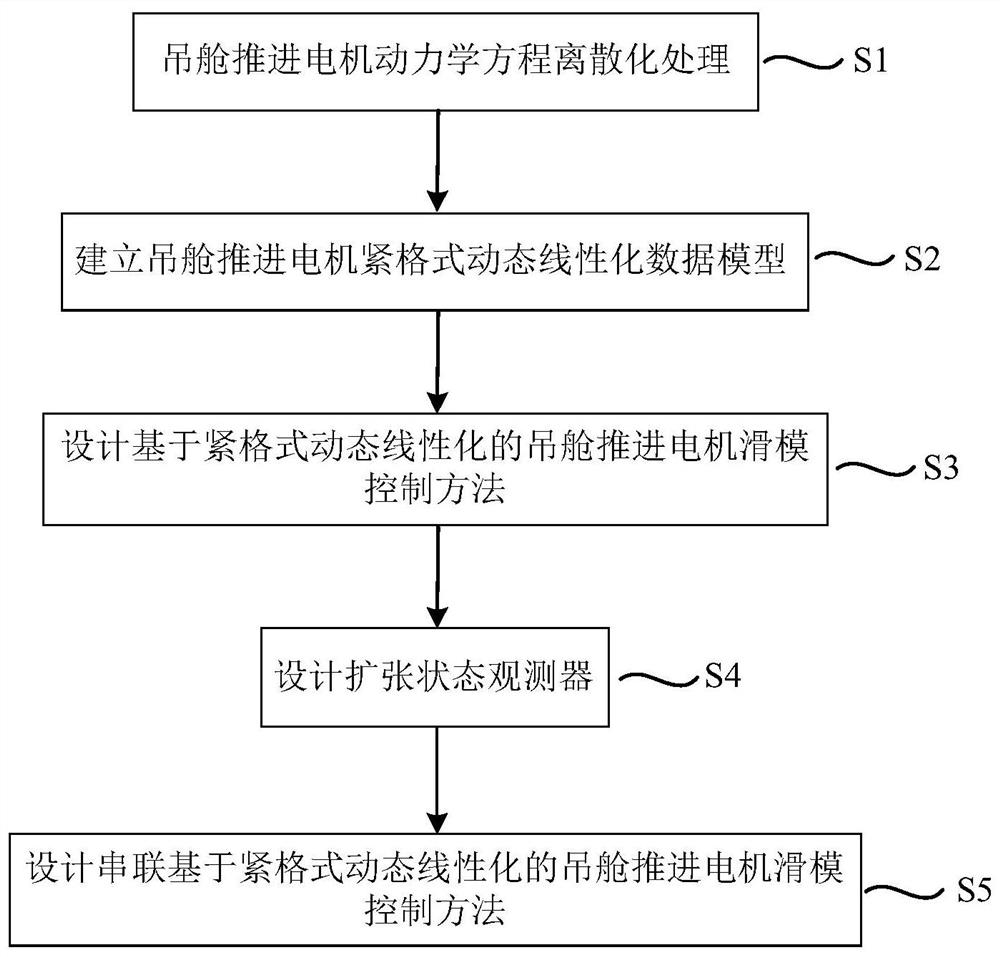
[0084] see figure 1 As shown, this embodiment of the semi-submersible ship pod propulsion motor control scheme specifically includes the following steps:
[0085] Step S1: Establish a dynamic model of the pod propulsion motor and discretize it:
[0086] 1) When designing the control strategy for the pod propulsion motor, in order to meet the higher torque performance requirements of the pod propulsion motor, i dw = 0 of the permanent magnet synchronous motor rotor field-oriented control method, the propulsion motor torque equation of the permanent magnet synchronous m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More