

High-precision image splicing method under multi-vehicle cooperative constraint
An image mosaic, high-precision technology, applied in image enhancement, image data processing, instruments, etc., can solve problems such as complex types, poor quality, large data volume, etc., to meet high-precision requirements, improve feature registration accuracy, and solve The effect of color inconsistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0120] The verification of the present invention is completed in the multi-UAV cooperative target detection and recognition system with the registration number 2020SR1088587.
[0121] 1. Experimental environment
[0122] CPU: Intel Xeon E5-1650 v4;
[0123] RAM: 32GB;
[0124] GPU: NVIDIA TITAN-X, Windows10 system, Visual studio 2015+Anaconda3.5+Python3.6.
[0125] 2. Experimental process
[0126] The experiment uses the aerial images collected by the multi-UAV flight platform in the patrol flight experiment to verify the performance of the proposed stitching algorithm, including two experiments:
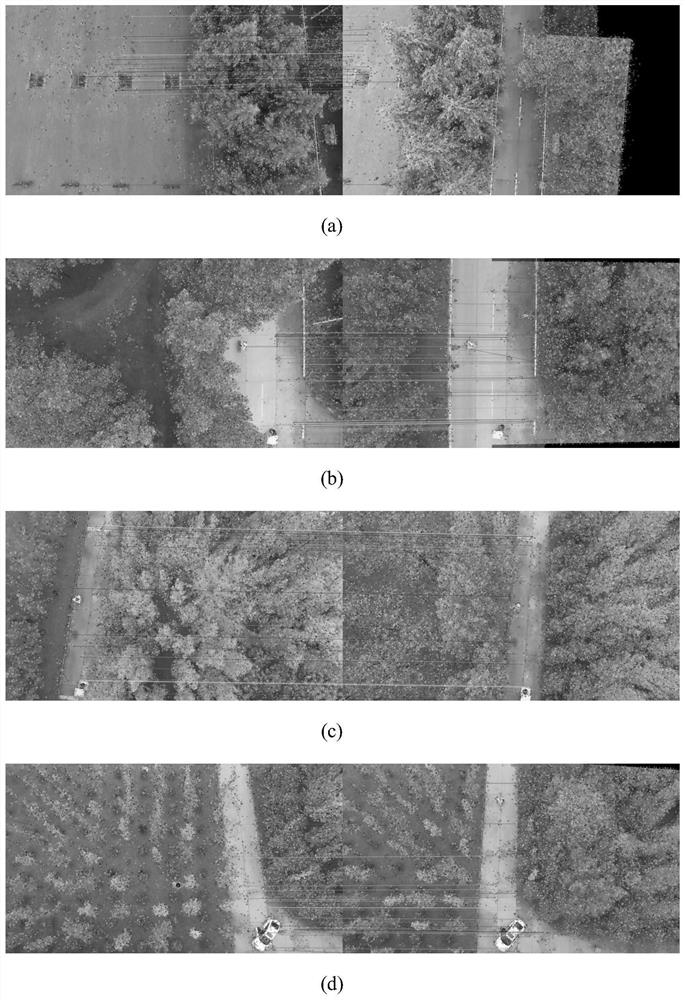
[0127] (1) Two groups of different aerial photography source image stitching experiments
[0128] According to each step of the splicing method proposed by the present invention, the aerial photography source images of two groups of different sources are as attached Figure 4 As shown, effective splicing is obtained respectively, and the splicing is relatively smooth. The resul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More