

Self-adaptive dynamic programming optimal control method and system based on co-state assistance
A dynamic programming and optimal control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as poor control effect, cost function cannot guarantee accurate evaluation, etc., to reduce computational cost, reduce The number of times, the effect of speeding up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034]The present invention will be described in further detail below in conjunction with the embodiments given in the accompanying drawings.
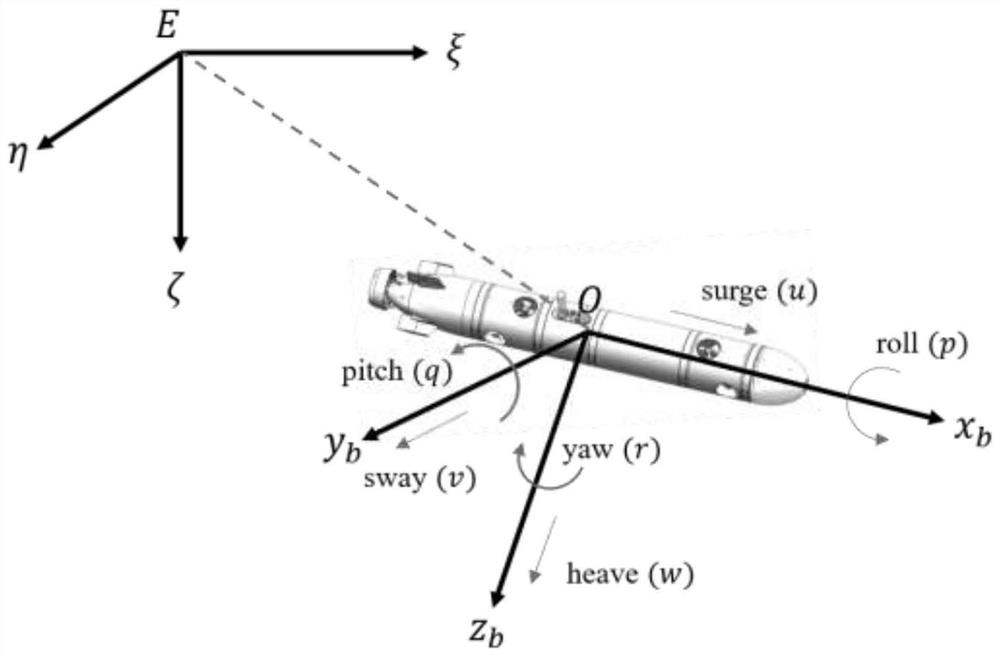
[0035] The specific embodiment of the combination of the present invention is an autonomous underwater robot depth control system, which has the characteristics of strong nonlinearity, strong coupling, and uncertainty in the hydrodynamic coefficient. At the same time, the working environment of the autonomous underwater robot also has random and time Due to the changing dynamic characteristics, we cannot accurately predict external disturbances.
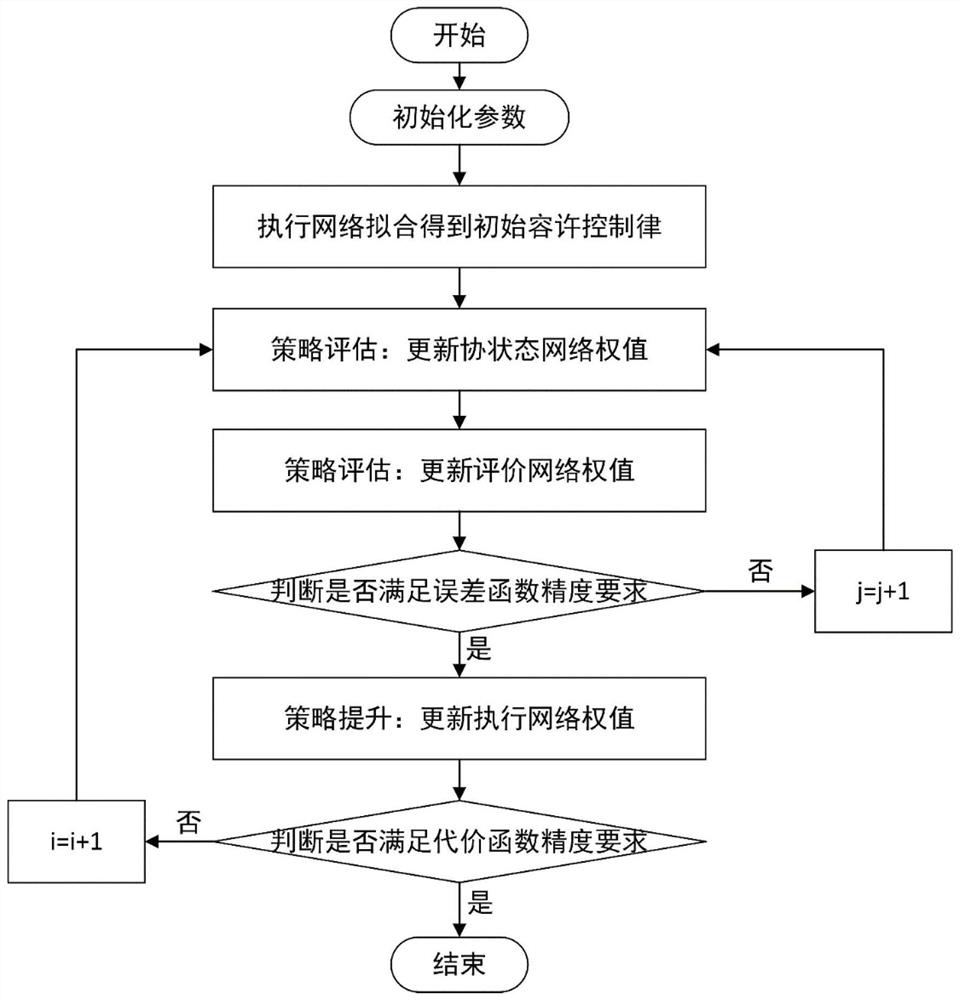
[0036] The flow chart of the adaptive dynamic programming optimal control method based on co-state assistance of the present invention is as follows figure 1 shown.
[0037] Step 1. Construct the state variable, control variable, transfer environment, utility function and cost function in the depth control of autonomous underwater vehicle.
[0038] First define two reference coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More