

State constraint-based asynchronous motor finite time dynamic surface control method considering iron loss
A technology of asynchronous motor and dynamic surface control, which is applied in the direction of motor generator control, electronic commutation motor control, control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0189] The basic idea of the present invention is: utilize neural network to approximate the non-linear term in the asynchronous motor drive system, utilize the obstacle Lyapunov function to constrain the rotor angular velocity, the stator current and other states of the asynchronous motor drive system in a given state interval; at the same time, Introducing dynamic surface technology to overcome the "calculation explosion" problem that cannot be avoided by traditional backstepping methods, combined with finite time control technology to improve the asymptotic convergence of tracking signals to finite time convergence and speed up the response and convergence speed of the system, and construct a state-based constraint A finite-time dynamic surface controller for asynchronous motors.
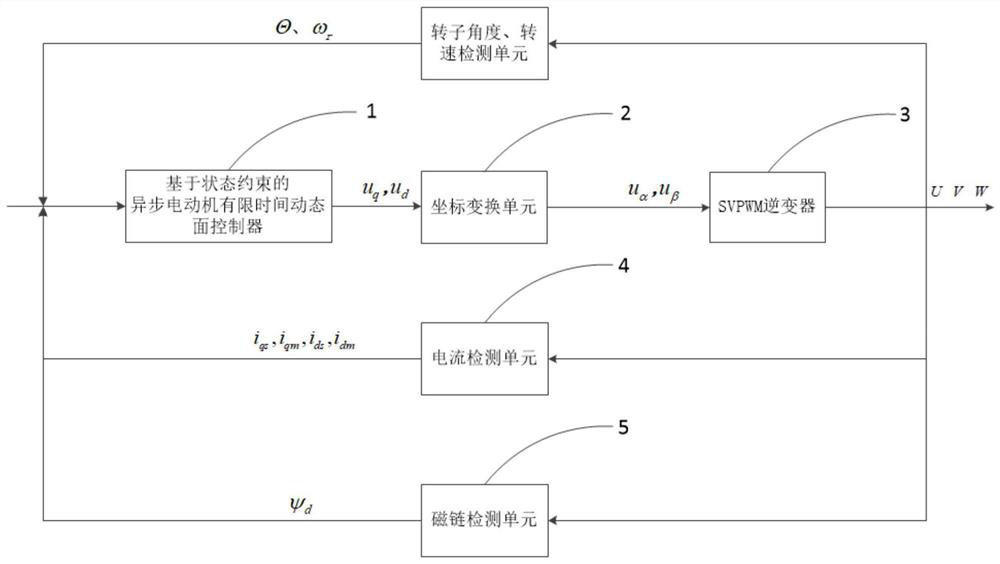
[0190] figure 1 It is a schematic diagram of a compound controlled object composed of a finite-time dynamic surface controller for an asynchronous motor based on a state constraint, a coordinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More